Motivation and definition of the inverse of a matrix

- License
- (CC-BY-NC-SA-4.0 OR CC-BY-SA-4.0)
- Created On
- January 5th, 2017
- 8 years ago
- Views
- 3
- Type
- Video
- Timeframe
- Pre-class
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
The product of a matrix times a vector is defined, and used to show that a system of linear equations is equivalent to a system of linear equations involving matrices and vectors. The example uses a 2x3 system.
- License
- CC-BY-SA-4.0
- Created On
- February 15th, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Timeframe
- Pre-class
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
Advice to instructors for in-class activities on matrix-vector multiplication and translating between the various equivalent notation forms of linear systems, and suggestions for how this topic can be used to motivate future topics.
- Created On
- February 15th, 2017
- 7 years ago
- Views
- 3
- Type
- Handout
- Timeframe
- In-class
- Perspective
- Example
- Language
- English
- Content Type
- text/html; charset=utf-8
A 3x3 system having a unique solution is solved by putting the augmented matrix in reduced row echelon form. A picture of three intersecting planes provides geometric intuition.

- Created On
- February 15th, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Timeframe
- Review
- Perspective
- Example
- Language
- English
- Content Type
- text/html; charset=utf-8
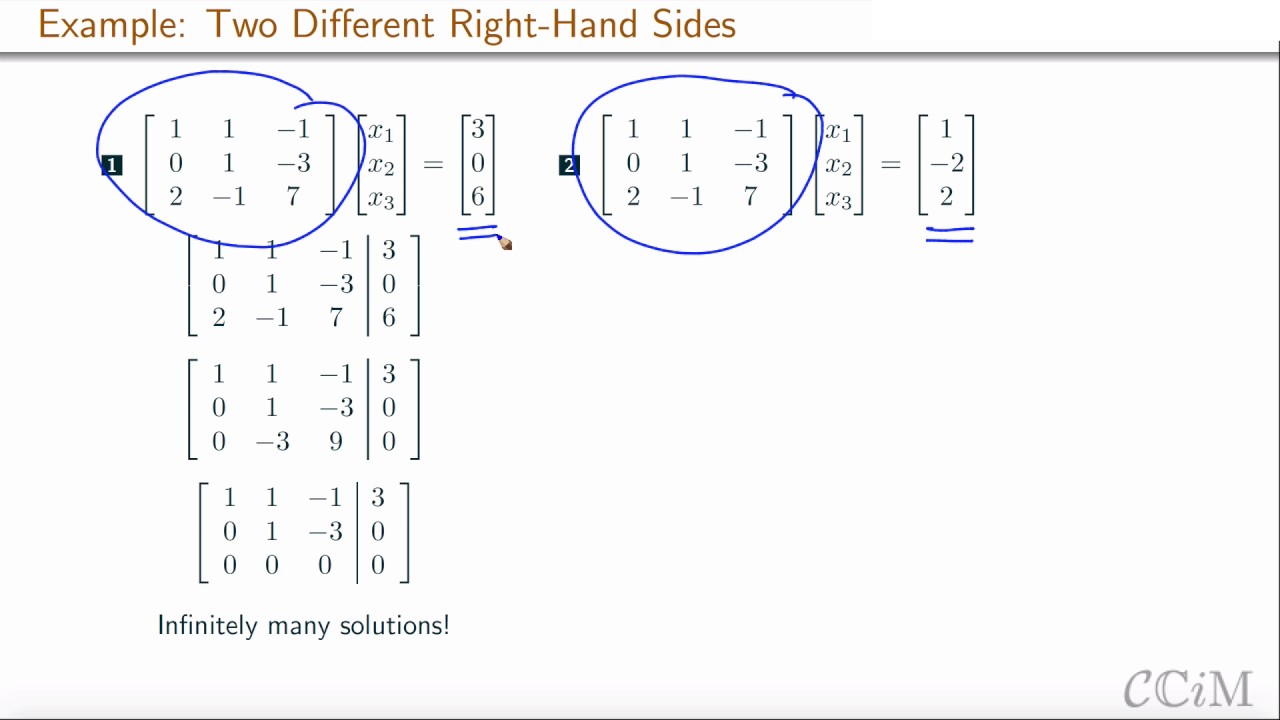
A 3x3 matrix equation Ax=b is solved for two different values of b. In one case there is no solution, and in another there are infinitely many solutions. These examples illustrate a theorem about linear combinations of the columns of the matrix A.
- Created On
- February 15th, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Timeframe
- Pre-class
- Perspective
- Example
- Language
- English
- Content Type
- text/html; charset=utf-8
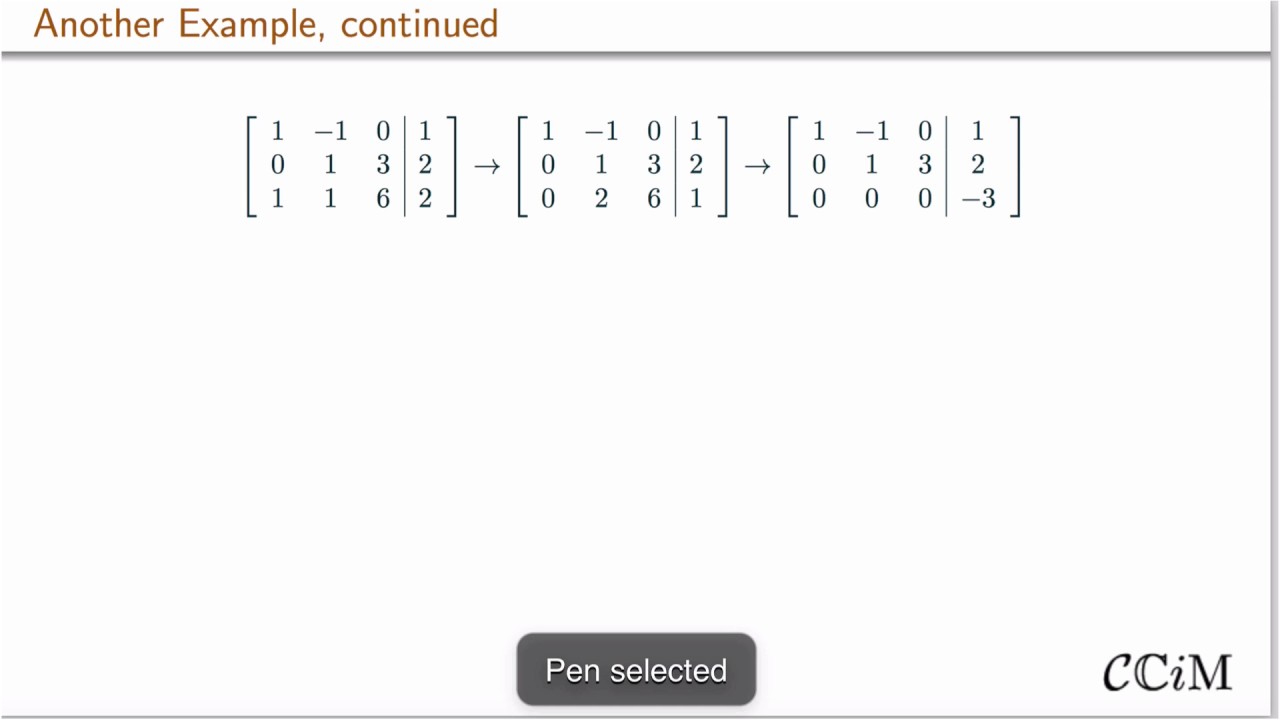
The reduced row echelon form is used to determine when a 3x3 system is inconsistent. A picture of planes in 3-dimensional space is used to provide geometric intuition.
- Created On
- February 15th, 2017
- 7 years ago
- Views
- 4
- Type
- Video
- Timeframe
- Review
- Perspective
- Example
- Language
- English
- Content Type
- text/html; charset=utf-8
Applet to show the configuration of planes corresponding to a 3x3 system having 0, 1, or infinitely many solutions. (need to make tags for this topic)
Sample problems to help understand when a linear system has 0, 1, or infinitely many solutions.
- Created On
- February 15th, 2017
- 7 years ago
- Views
- 2
- Type
- Handout
- Timeframe
- In-class
- Perspective
- Example
- Language
- English
- Content Type
- text/html; charset=utf-8
Linear independence is defined, followed by a worked example of 3 vectors in R^3.
- Created On
- February 15th, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Timeframe
- Pre-class
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
Linear transformations are defined, and some small examples (and non examples) are explored. (need tag for R^2 -> R^2 example, general)

- Created On
- February 15th, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Timeframe
- Pre-class
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
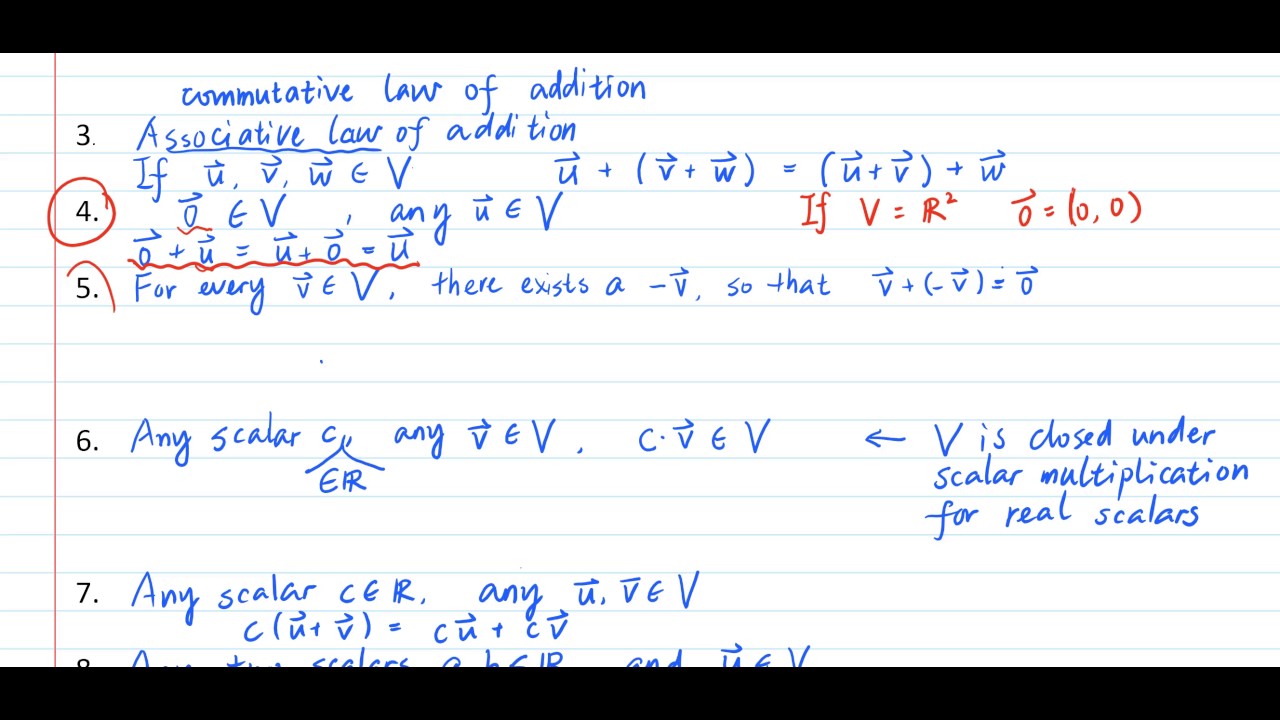
Two proofs, with discussion, of the fact that an abstract linear transformation maps 0 to 0.
- Created On
- February 15th, 2017
- 7 years ago
- Views
- 2
- Type
- Handout
- Timeframe
- Pre-class
- Perspective
- Proof
- Language
- English
- Content Type
- text/html; charset=utf-8
Examples of special types of linear transformation from R^2 to R^2: dilation, projection, and shear. (Some issues with the video: things re-start around the 10 second mark, and at 3:46 the word "projection" is said, when it should be "transformation". Also, at the end maybe it could be described why it is called a 'shear'.)
- Created On
- February 15th, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Timeframe
- Post-class
- Perspective
- Example
- Language
- English
- Content Type
- text/html; charset=utf-8
For a specific 3x3 matrix, solve Ax=0 by row reducing an augmented matrix.
- Created On
- February 15th, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Timeframe
- Review
- Perspective
- Example
- Language
- English
- Content Type
- text/html; charset=utf-8
Visualize 2-d linear transformations by looking at the image of geometric object. (Need topic: Visualize a linear transformation on R^2 by its effect on a region.)
- Created On
- February 15th, 2017
- 7 years ago
- Views
- 2
- Type
- Applet
- Timeframe
- Review
- Perspective
- Example
- Language
- English
- Content Type
- text/html; charset=UTF-8
Notation for matrix entries, diagonal matrix, square matrix, identity matrix, and zero matrix.
- Created On
- February 17th, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Timeframe
- Pre-class
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
Definition of sum of matrices, product of a scalar and a matrix
- Created On
- February 17th, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Timeframe
- Pre-class
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
Learning goals: 1. What are the dimension (size) requirements for two matrices so that they can be multiplied to each other? 2. What is the product of two matrices, when it exists?

- Created On
- February 17th, 2017
- 7 years ago
- Views
- 2
- Type
- Video
- Timeframe
- Review
- Language
- English
- Content Type
- text/html; charset=utf-8
A 2x2 example is used to show that AB does not always equal BA.
- Created On
- February 17th, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Timeframe
- Review
- Language
- English
- Content Type
- text/html; charset=utf-8
Example 3x2 and a 2x3 matrices are used to show that AB does not always equal BA
- Created On
- February 17th, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Timeframe
- Post-class
- Perspective
- Example
- Language
- English
- Content Type
- text/html; charset=utf-8
The transpose of a matrix is defined, and various properties are explored using numerical examples.
- Created On
- February 17th, 2017
- 7 years ago
- Views
- 2
- Type
- Video
- Timeframe
- Pre-class
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
Suggestions for in-class activities on matrix operations: addition, multiplication, transpose, and the fact that multiplication is not commutative.
- Created On
- February 17th, 2017
- 7 years ago
- Views
- 2
- Type
- Handout
- Timeframe
- In-class
- Language
- English
- Content Type
- text/html; charset=utf-8
The definition of matrix inverse is motivated by considering multiplicative inverse. The identity matrix and matrix inverse are defined.
- Created On
- February 17th, 2017
- 7 years ago
- Views
- 2
- Type
- Video
- Timeframe
- Pre-class
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
The formula for the inverse of a 2x2 matrix is derived. (need tag for that formula)

- Created On
- February 17th, 2017
- 7 years ago
- Views
- 2
- Type
- Video
- Timeframe
- Pre-class
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
Matrix inverses are motivated as a way to solve a linear system. The general algorithm of finding an inverse by row reducing an augmented matrix is described, and then implemented for a 3x3 matrix. Useful facts about inverses are stated and then illustrated with sample 2x2 matrices. (put first: need Example of finding the inverse of a 3-by-3 matrix by row reducing the augmented matrix)

- Created On
- February 19th, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Timeframe
- Pre-class
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
Suggested classroom activities on matrix inverses.
- Created On
- February 19th, 2017
- 7 years ago
- Views
- 2
- Type
- Handout
- Timeframe
- In-class
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
Eleven different statements are shown to be equivalent to "The matrix A is nonsingular". (need a tag for a theorem that contains several of these equivalences)

A guide for discussing the many statements equivalent to "The matrix A is nonsingular". (need a tag for multiple equivalences)
Definition of vector, equality of vectors, vector addition, and scalar vector multiplication. Geometric and algebraic properties of vector addition are discussed. (need a topic on vector addition is commutative and associative)
- Created On
- February 19th, 2017
- 7 years ago
- Views
- 2
- Type
- Video
- Timeframe
- Pre-class
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
The linear combination of a set of vectors is defined. Determine if a vector in R^2 is in the span of two other vectors. The span of a set of vectors is related to the columns of a matrix. (need topic: Determine if a vector in R^2 is in the span of two other vectors.)
- Created On
- February 20th, 2017
- 7 years ago
- Views
- 2
- Type
- Video
- Timeframe
- Pre-class
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
Definition of the span of a set of vectors. Example of checking if a vector in R^3 is in the span of a set of two vectors. Geometric picture of a span.
- Created On
- February 20th, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Timeframe
- Pre-class
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
Suggestions for in-class activities on linear combination and span of vectors in R^n. (need a topic for the general *process* of determining if a vector is in the span of a set of devtors)
- Created On
- February 20th, 2017
- 7 years ago
- Views
- 2
- Type
- Handout
- Timeframe
- In-class
- Language
- English
- Content Type
- text/html; charset=utf-8
A 4x4 matrix is put into row echelon form (not RREF), with motivation and all the details (need a 4x4 ref tag)
Suggestions for in-class activities for row reduction. (Need to add tags. The refrenced videos should be separate assets.)
This video kicks off the series of videos on vector spaces. We begin by summarizing the essential properties of R^n.

- License
- CC-BY-SA-4.0
- Created On
- January 1st, 2017
- 8 years ago
- Views
- 3
- Type
- Video
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
Matrices can be thought of as transforming space, and understanding how this work is crucial for understanding many other ideas that follow in linear algebra...
- License
- Unlicense
- Created On
- May 25th, 2017
- 7 years ago
- Views
- 2
- Type
- Video
- Timeframe
- Pre-class
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
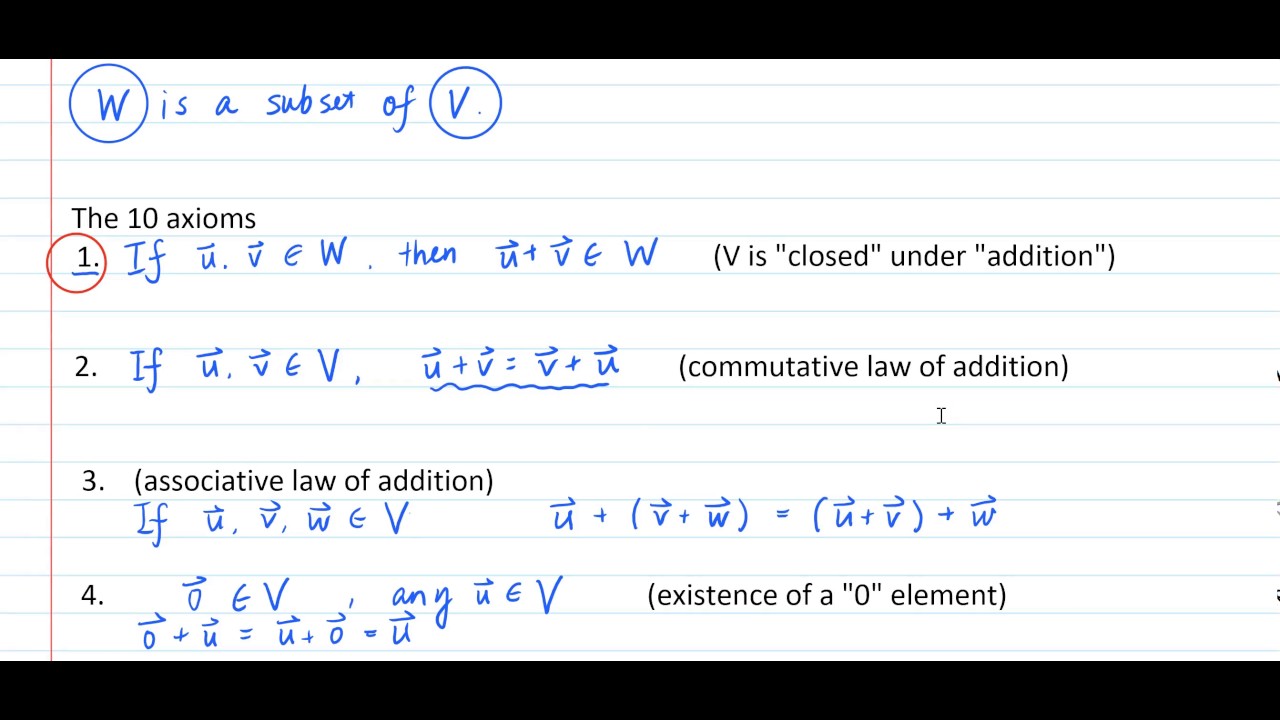
In this video we continue to list the properties of R^n. The 10 properties listed in this video and the previous video will be used to define a general vecto...

- License
- CC-BY-SA-4.0
- Created On
- December 28th, 2016
- 8 years ago
- Views
- 3
- Type
- Video
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
The concept of a vector space is somewhat abstract, and under this definition, a lot of objects such as polynomials, functions, etc., can be considered as vectors. This video explains the definition of a general vector space. In later videos we will look at more examples.

- License
- CC-BY-SA-4.0
- Created On
- January 1st, 2017
- 8 years ago
- Views
- 2
- Type
- Video
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
Preliminaries: 1. What is a subset? 2. How to verify a set is a subset of another set? 3. Notations and language of set theory related to subsets. In this video, we introduce the definition of a subspace. We go through a preliminary example to figure out what do subspaces of R^2 look like, and we will continue to talk about how to verify a subset of a vector space is a subspace in later videos.
- License
- CC-BY-SA-4.0
- Created On
- January 3rd, 2017
- 8 years ago
- Views
- 3
- Type
- Video
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
In-class activity for linear combinations and span.
- License
- GFDL-1.3
- Created On
- June 8th, 2017
- 7 years ago
- Views
- 3
- Type
- Handout
- Timeframe
- In-class
- Perspective
- Introduction
- Language
- English
- Content Type
- application/pdf
Linear independence in-class activity
- License
- GFDL-1.3
- Created On
- June 8th, 2017
- 7 years ago
- Views
- 3
- Type
- Handout
- Timeframe
- In-class
- Perspective
- Example
- Language
- English
- Content Type
- application/pdf
After watching a video defining linear transformations and giving examples of 2-D transformations, students should be able to answer the questions in this quiz.
- Created On
- June 8th, 2017
- 7 years ago
- Views
- 2
- Type
- Handout
- Timeframe
- Pre-class
- Language
- English
- Content Type
- text/html; charset=utf-8
In-class activity to be completed after an introduction to transformations and ideally in teams. In part 1, students are guided to discover the theorem describing the matrix of a linear transformation from R^n to R^m. In part 2, students learn the one-to-one and onto properties of linear transformations, and are asked to relate these properties to the properties of the matrices (linear independence of columns and columns spanning the codomain).
- Created On
- June 8th, 2017
- 7 years ago
- Views
- 2
- Type
- Handout
- Timeframe
- In-class
- Language
- English
- Content Type
- text/html; charset=utf-8
Students answer multiple questions on the rank and dimension of the null space in a variety of situations to discover the connection between these dimensions leading to the Rank-Nullity Theorem.
- Created On
- June 9th, 2017
- 7 years ago
- Views
- 2
- Type
- Handout
- Timeframe
- In-class
- Language
- English
- Content Type
- text/html; charset=utf-8
An introductory activity on eigenvalues and eigenvectors in which students do basic matrix-vector multiplication calculations to find whether given vectors are eigenvectors, to determine the eigenvalue corresponding to an eigenvector and to find an eigenvector corresponding to an eigenvalue. This activity is self-contained and does not require any previous experience with eigenvalues or eigenvectors.
- Created On
- June 9th, 2017
- 7 years ago
- Views
- 2
- Type
- Handout
- Timeframe
- Pre-class
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
This is an activity on how linear algebra can be used to find the Lagrange polynomials to construct the polynomial of degree n that passes through n+1 distinct points. This activity requires knowledge of vector spaces (particularly polynomial spaces), linear transformations, and matrix inverses. It would be helpful to have a tag for applications of linear algebra for material like this.
University of Waterloo Math Online -
- Created On
- October 23rd, 2013
- 11 years ago
- Views
- 2
- Type
- Video
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html;charset=UTF-8
Slides for the accompanying video from University of Waterloo.
- Created On
- October 23rd, 2013
- 11 years ago
- Views
- 3
- Type
- Handout
- Perspective
- Introduction
- Language
- English
- Content Type
- application/pdf
From the University of Waterloo Math Online
- Created On
- October 23rd, 2013
- 11 years ago
- Views
- 3
- Type
- Video
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html;charset=UTF-8
Slides from the corresponding video from the University of Waterloo.
- Created On
- October 23rd, 2013
- 11 years ago
- Views
- 3
- Type
- Handout
- Perspective
- Introduction
- Language
- English
- Content Type
- application/pdf
Video Lesson from University of Waterloo.
- Created On
- October 23rd, 2013
- 11 years ago
- Views
- 2
- Type
- Video
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html;charset=UTF-8
This is a guided discovery of the formula for Lagrange Interpolation, which lets you find the formula for a polynomial which passes through a given set of points.
- Created On
- June 8th, 2017
- 7 years ago
- Views
- 2
- Type
- Handout
- Perspective
- Application
- Language
- English
- Content Type
- text/html; charset=utf-8
Quiz from the University of Waterloo.
- Created On
- October 23rd, 2013
- 11 years ago
- Views
- 4
- Type
- Unknown
- Timeframe
- Post-class
- Perspective
- Example
- Language
- English
- Content Type
- text/html;charset=UTF-8
This is a video from the University of Waterloo. Dot Product, Cross-Product in R^n (which should be in Chapter 8 section 4 about hyperplanes.
math.la.d.vec.norm.coord
math.la.d.innerproduct.real.coord
math.la.t.innerproduct.commutative.coord
math.la.t.innerproduct.distributive.coord
math.la.t.innerproduct.commutative.scalar.real.coord
math.la.t.innerproduct.self.z.coord
math.la.d.vec.subspace.orthogonal
math.la.d.vec.orthogonal
math.la.d.vec.unit.coord
math.la.d.crossproduct
- Created On
- October 23rd, 2013
- 11 years ago
- Views
- 3
- Type
- Video
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html;charset=UTF-8
Quiz from the University of Waterloo. This is intended to be used after the video of the same name.
math.la.d.vec.unit.coord
math.la.d.distance.coord
math.la.d.vec.norm.coord
math.la.t.innerproduct.self.z.coord
math.la.t.innerproduct.commutative.scalar.real.coord
math.la.t.innerproduct.distributive.coord
math.la.t.innerproduct.commutative.coord
math.la.d.innerproduct.real.coord
math.la.d.vec.orthogonal
- Created On
- October 23rd, 2013
- 11 years ago
- Views
- 3
- Type
- Unknown
- Timeframe
- Post-class
- Perspective
- Example
- Language
- English
- Content Type
- text/html;charset=UTF-8
This is from the University of Waterloo. It includes content about Projections, as well as some content from the Multivariable Calculus. These notions are developed in Euclidean Space.
- Created On
- October 23rd, 2013
- 11 years ago
- Views
- 3
- Type
- Video
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html;charset=UTF-8
This is a quiz from the University of Waterloo. It is a quiz about projections that is strictly in R^n. It additionally asks questions on perpendicular vectors and cross products.
- Created On
- October 23rd, 2013
- 11 years ago
- Views
- 2
- Type
- Unknown
- Timeframe
- Post-class
- Perspective
- Example
- Language
- English
- Content Type
- text/html;charset=UTF-8
In this video, I'll explain why we only need to test 2 axioms (among the 10 axioms in the definition of a vector space) when figuring out if a subset is a subspace.
- License
- CC-BY-SA-4.0
- Created On
- June 9th, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Timeframe
- Pre-class
- Perspective
- Introduction
- Language
- English
- Content Type
- text/html; charset=utf-8
One-to-one and onto properties of liner transformations: definition, geometric interpretation, examples, connection with properties of the columns of a matrix representation.

- Created On
- August 21st, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Equivalence of systems of linear equations, row operations, corresponding matrices representing the linear systems

- Created On
- August 21st, 2017
- 7 years ago
- Views
- 2
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Statements that are equivalent to a square matrix being invertible; examples.

- Created On
- August 21st, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Orthogonal projection onto subspace in R^n minimizes distance; projection formula simplification for orthonormal bases; relation to orthogonal matrices

- Created On
- August 21st, 2017
- 7 years ago
- Views
- 4
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
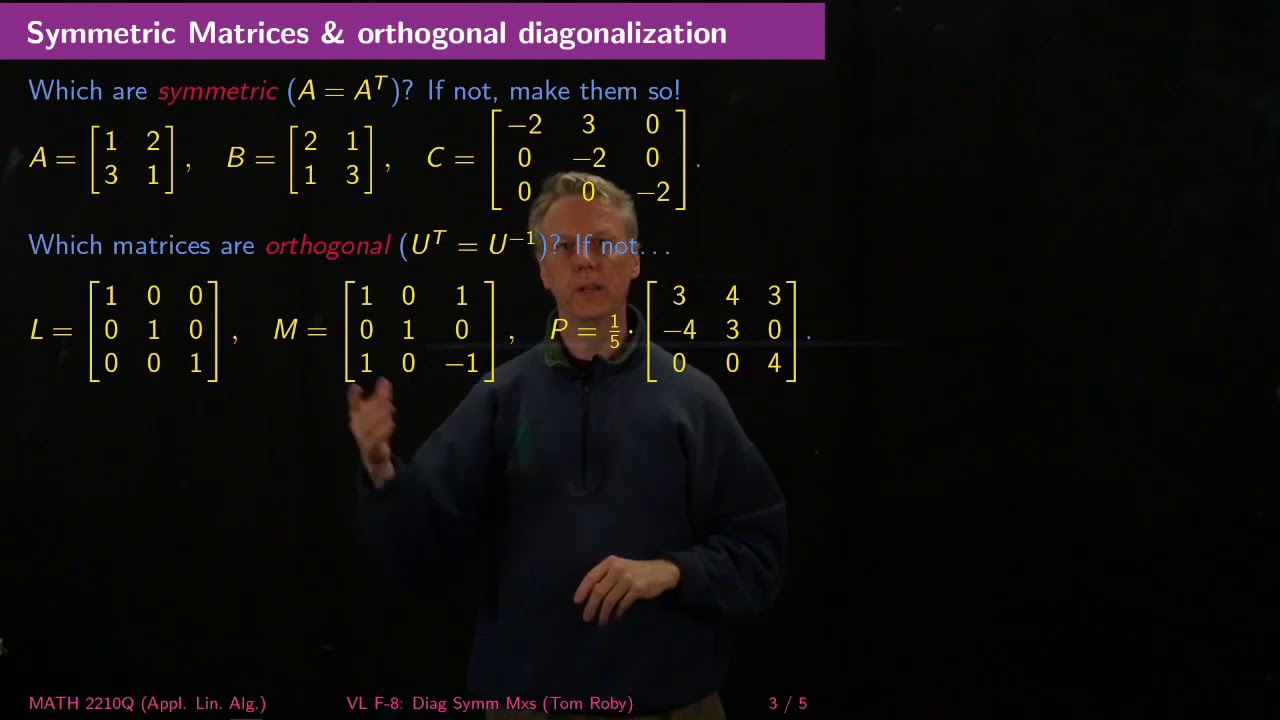
A real matrix $A$ is symmetric if and only if it is orthogonally diagonalizable (i.e. $A = PDP^{-1}$ for an orthogonal matrix $P$.) Proof and examples.
- Created On
- August 21st, 2017
- 7 years ago
- Views
- 4
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Inner product of two vectors in R^n, length of a vector in R^n, orthogonality. Motivation via approximate solutions of systems of linear equations, definition and properties of inner product (symmetric, bilinar, positive definite); length/norm of a vector, unit vectors; definition of distance between vectors; definition of orthogonality; Pythagorean Theorem.

- Created On
- August 22nd, 2017
- 7 years ago
- Views
- 2
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Definition of the inverse of a matrix, examples, uniqueness; formula for the inverse of a 2x2 matrix; determinant of a 2x2 matrix; using the inverse to solve a system of linear equations.

- Created On
- August 22nd, 2017
- 7 years ago
- Views
- 4
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
How to compute all solutions to a general system $Ax=b$ of linear equations and connection to the corresponding homogeneous system $Ax=0$. Visualization of the geometry of solution sets. Consistent systems and their solution using row reduction.

- Created On
- August 22nd, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
The effect of row operations on the determinant of a matrix; computing determinants via row reduction; a square matrix is invertible if and only if its determinant is nonzero.

- Created On
- August 22nd, 2017
- 7 years ago
- Views
- 4
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Definition of the eigenspace corresponding to an eigenvector $\lambda$ (and proof that this is a vector space); analysis of simple matrices in R^2 and R^3 to visualize the "geometry" of eigenspaces; proof that eigenvectors corresponding to distinct eigenvectors are linearly independent

- Created On
- August 25th, 2017
- 7 years ago
- Views
- 2
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Properties of matrix inversion: inverse of the inverse, inverse of the transpose, inverse of a product; elementary matrices and corresponding row operations; a matrix is invertible if and only if it is row-equivalent to the identity matrix; row-reduction algorithm for computing matrix inverse

- Created On
- August 25th, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Basis theorem: for an n-dimensional vector space any linearly independent set with n elements is a basis, as is any spanning set with n elements; dimension of the column space of a matrix equals the number of pivot columns of the matrix; dimension of the null space of a matrix equals the number of free variables of the matrix

- Created On
- August 25th, 2017
- 7 years ago
- Views
- 4
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Diagonalization theorem: a nxn matrix A is diagonalizable if and only if it has n linearly independent eigenvectors. If so, the matrix factors as A = PDP^{-1}, where D is diagonal and P is invertible (and its columns are the n linearly independent eigenvectors). Algorithm to diagonalize a matrix.

- Created On
- August 25th, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Homogeneous systems of linear equations; trivial versus nontrivial solutions of homogeneous systems; how to find nontrivial solutions; how to know from the reduced row-echelon form of a matrix whether the corresponding homogeneous system has nontrivial solutions.

- Created On
- August 25th, 2017
- 7 years ago
- Views
- 4
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
The pivot columns of a matrix form a basis for its column space; nullspace of a matrix equals the nullspace of its reduced row-echelon form.

- Created On
- August 25th, 2017
- 7 years ago
- Views
- 4
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Definition of a (real) vector space; properties of the zero vector and the additive inverse in relation to scalar multiplication

- Created On
- August 25th, 2017
- 7 years ago
- Views
- 2
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
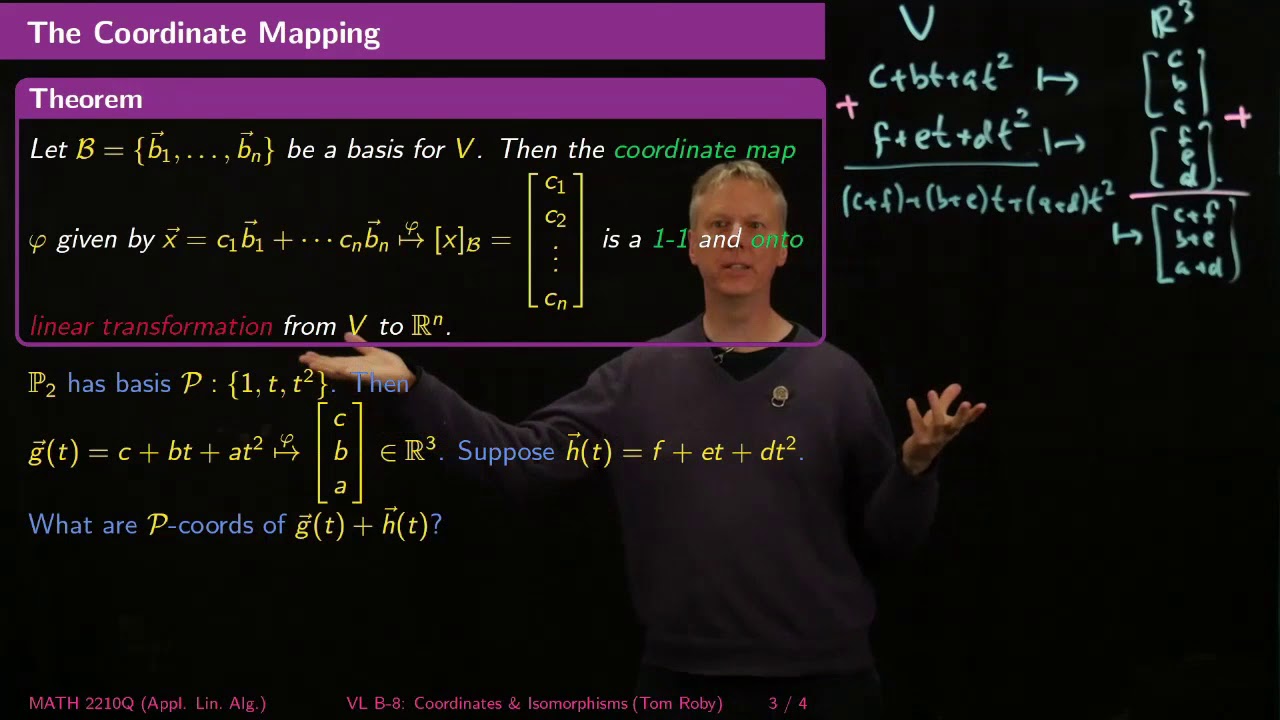
Representation (unique) of a vector in terms of a basis for a vector space yields coordinates relative to the basis; change of basis and corresponding change of coordinate matrix

- Created On
- August 25th, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Definition of echelon form, reduction of a matrix to echelon form in order to compute solutions to systems of linear equations; definition of reduced row echelon form

- Created On
- August 25th, 2017
- 7 years ago
- Views
- 2
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Use matrix transformations to motivate the concept of linear transformation; examples of matrix transformations

- Created On
- August 25th, 2017
- 7 years ago
- Views
- 2
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Determinant of the transpose equals the determinant of the original matrix; rescaling a column rescales the determinant by the same factor; interchanging two columns changes the sign of the determinant; adding multiple of one column to another leaves determinant unchanged; determinant of the product of two matrices equals product of the two determinants

- Created On
- August 25th, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
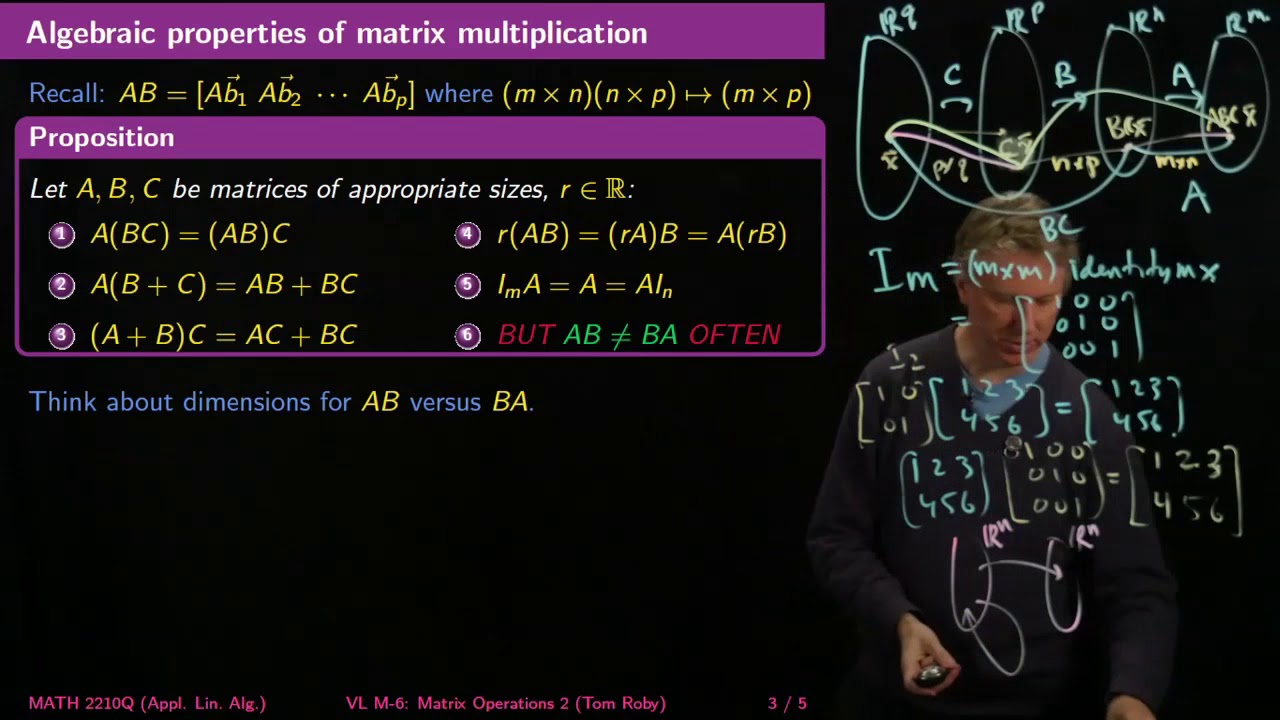
Associative and distributive properties of matrix multiplication and addition; multiplication by the identity matrix; definition of the transpose of a matrix; transpose of the transpose, transpose of a sum, transpose of a product
- Created On
- August 25th, 2017
- 7 years ago
- Views
- 2
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Equivalent statements for a matrix A: for every right-hand side b, the system Ax=b has a solution; every b is a linear combination of the columns of A; the span of the columns of A is maximal; A has a pivot position in every row.

- Created On
- August 25th, 2017
- 7 years ago
- Views
- 2
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Orthonormal sets and bases (definition); expressing vectors as linear combinations of orthonormal basis vectors; matrices with orthonormal columns preserve vector norm and dot product; orthogonal matrices; inverse of an orthogonal matrix equals its transpose

- Created On
- August 25th, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Definition of the column space of a matrix; column space is a subspace; comparison to the null space; definition of a linear transformation between vector spaces; definition of kernel and range of a linear transformation

- Created On
- August 25th, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Given a basis for a n-dimensional vector space V, the coordinate map is a linear bijection between V and R^n; definition isomorphisms between vector spaces and isomorphic vector spaces.
- Created On
- August 25th, 2017
- 7 years ago
- Views
- 2
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Motivation of the definition of a linear transformation using properties of matrices; examples; geometric intuition; matrix representation of a linear transformation

- Created On
- September 3rd, 2017
- 7 years ago
- Views
- 3
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Theorem: \lambda is an eigenvalue of a matrix A if and only if \lambda satisfies the characteristic equation det(A-\lambda I) = 0; examples; eigenvalues of triangular matrices are the diagonal entries.

- Created On
- September 3rd, 2017
- 7 years ago
- Views
- 2
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Definition of a vector; vector addition; scalar multiplication; visualization in R^2 and R^3; vector space axioms; linear combinations; span.

- Created On
- September 3rd, 2017
- 7 years ago
- Views
- 2
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Definition of similarity for square matrices; similarity is an equivalence relation; similar matrices have the same characteristic polynomial and hence the same eigenvalues, with same multiplicities; definition of multiplicity.

- Created On
- September 3rd, 2017
- 7 years ago
- Views
- 2
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
Definition of a subspace of a vector space; examples; span of vectors is a subspace.

- Created On
- September 3rd, 2017
- 7 years ago
- Views
- 2
- Type
- Video
- Language
- English
- Content Type
- text/html; charset=utf-8
We will motivate our study of linear algebra by considering the problem of solving several linear equations simultaneously. The word solve tends to get abused somewhat, as in “solve this problem.” When talking about equations we understand a more precise meaning: find all of the values of some variable quantities that make an equation, or several equations, simultaneously true.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We will motivate our study of linear algebra by considering the problem of solving several linear equations simultaneously. The word solve tends to get abused somewhat, as in “solve this problem.” When talking about equations we understand a more precise meaning: find all of the values of some variable quantities that make an equation, or several equations, simultaneously true.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We begin our study of linear algebra with an introduction and a motivational example.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We will motivate our study of linear algebra by considering the problem of solving several linear equations simultaneously. The word solve tends to get abused somewhat, as in “solve this problem.” When talking about equations we understand a more precise meaning: find all of the values of some variable quantities that make an equation, or several equations, simultaneously true.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We will motivate our study of linear algebra by considering the problem of solving several linear equations simultaneously. The word solve tends to get abused somewhat, as in “solve this problem.” When talking about equations we understand a more precise meaning: find all of the values of some variable quantities that make an equation, or several equations, simultaneously true.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
After solving a few systems of equations, you will recognize that it does not matter so much what we call our variables, as opposed to what numbers act as their coefficients. A system in the variables \(x_1,\,x_2,\,x_3\) would behave the same if we changed the names of the variables to \(a,\,b,\,c\) and kept all the constants the same and in the same places. In this section, we will isolate the key bits of information about a system of equations into something called a matrix, and then use this matrix to systematically solve the equations. Along the way we will obtain one of our most important and useful computational tools.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We will motivate our study of linear algebra by considering the problem of solving several linear equations simultaneously. The word solve tends to get abused somewhat, as in “solve this problem.” When talking about equations we understand a more precise meaning: find all of the values of some variable quantities that make an equation, or several equations, simultaneously true.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
After solving a few systems of equations, you will recognize that it does not matter so much what we call our variables, as opposed to what numbers act as their coefficients. A system in the variables \(x_1,\,x_2,\,x_3\) would behave the same if we changed the names of the variables to \(a,\,b,\,c\) and kept all the constants the same and in the same places. In this section, we will isolate the key bits of information about a system of equations into something called a matrix, and then use this matrix to systematically solve the equations. Along the way we will obtain one of our most important and useful computational tools.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
After solving a few systems of equations, you will recognize that it does not matter so much what we call our variables, as opposed to what numbers act as their coefficients. A system in the variables \(x_1,\,x_2,\,x_3\) would behave the same if we changed the names of the variables to \(a,\,b,\,c\) and kept all the constants the same and in the same places. In this section, we will isolate the key bits of information about a system of equations into something called a matrix, and then use this matrix to systematically solve the equations. Along the way we will obtain one of our most important and useful computational tools.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We will motivate our study of linear algebra by considering the problem of solving several linear equations simultaneously. The word solve tends to get abused somewhat, as in “solve this problem.” When talking about equations we understand a more precise meaning: find all of the values of some variable quantities that make an equation, or several equations, simultaneously true.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
After solving a few systems of equations, you will recognize that it does not matter so much what we call our variables, as opposed to what numbers act as their coefficients. A system in the variables \(x_1,\,x_2,\,x_3\) would behave the same if we changed the names of the variables to \(a,\,b,\,c\) and kept all the constants the same and in the same places. In this section, we will isolate the key bits of information about a system of equations into something called a matrix, and then use this matrix to systematically solve the equations. Along the way we will obtain one of our most important and useful computational tools.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
After solving a few systems of equations, you will recognize that it does not matter so much what we call our variables, as opposed to what numbers act as their coefficients. A system in the variables \(x_1,\,x_2,\,x_3\) would behave the same if we changed the names of the variables to \(a,\,b,\,c\) and kept all the constants the same and in the same places. In this section, we will isolate the key bits of information about a system of equations into something called a matrix, and then use this matrix to systematically solve the equations. Along the way we will obtain one of our most important and useful computational tools.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
After solving a few systems of equations, you will recognize that it does not matter so much what we call our variables, as opposed to what numbers act as their coefficients. A system in the variables \(x_1,\,x_2,\,x_3\) would behave the same if we changed the names of the variables to \(a,\,b,\,c\) and kept all the constants the same and in the same places. In this section, we will isolate the key bits of information about a system of equations into something called a matrix, and then use this matrix to systematically solve the equations. Along the way we will obtain one of our most important and useful computational tools.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
After solving a few systems of equations, you will recognize that it does not matter so much what we call our variables, as opposed to what numbers act as their coefficients. A system in the variables \(x_1,\,x_2,\,x_3\) would behave the same if we changed the names of the variables to \(a,\,b,\,c\) and kept all the constants the same and in the same places. In this section, we will isolate the key bits of information about a system of equations into something called a matrix, and then use this matrix to systematically solve the equations. Along the way we will obtain one of our most important and useful computational tools.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
After solving a few systems of equations, you will recognize that it does not matter so much what we call our variables, as opposed to what numbers act as their coefficients. A system in the variables \(x_1,\,x_2,\,x_3\) would behave the same if we changed the names of the variables to \(a,\,b,\,c\) and kept all the constants the same and in the same places. In this section, we will isolate the key bits of information about a system of equations into something called a matrix, and then use this matrix to systematically solve the equations. Along the way we will obtain one of our most important and useful computational tools.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We will now be more careful about analyzing the reduced row-echelon form derived from the augmented matrix of a system of linear equations. In particular, we will see how to systematically handle the situation when we have infinitely many solutions to a system, and we will prove that every system of linear equations has either zero, one or infinitely many solutions. With these tools, we will be able to routinely solve any linear system.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We will now be more careful about analyzing the reduced row-echelon form derived from the augmented matrix of a system of linear equations. In particular, we will see how to systematically handle the situation when we have infinitely many solutions to a system, and we will prove that every system of linear equations has either zero, one or infinitely many solutions. With these tools, we will be able to routinely solve any linear system.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We will now be more careful about analyzing the reduced row-echelon form derived from the augmented matrix of a system of linear equations. In particular, we will see how to systematically handle the situation when we have infinitely many solutions to a system, and we will prove that every system of linear equations has either zero, one or infinitely many solutions. With these tools, we will be able to routinely solve any linear system.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
After solving a few systems of equations, you will recognize that it does not matter so much what we call our variables, as opposed to what numbers act as their coefficients. A system in the variables \(x_1,\,x_2,\,x_3\) would behave the same if we changed the names of the variables to \(a,\,b,\,c\) and kept all the constants the same and in the same places. In this section, we will isolate the key bits of information about a system of equations into something called a matrix, and then use this matrix to systematically solve the equations. Along the way we will obtain one of our most important and useful computational tools.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we specialize to systems of linear equations where every equation has a zero as its constant term. Along the way, we will begin to express more and more ideas in the language of matrices and begin a move away from writing out whole systems of equations. The ideas initiated in this section will carry through the remainder of the course.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
After solving a few systems of equations, you will recognize that it does not matter so much what we call our variables, as opposed to what numbers act as their coefficients. A system in the variables \(x_1,\,x_2,\,x_3\) would behave the same if we changed the names of the variables to \(a,\,b,\,c\) and kept all the constants the same and in the same places. In this section, we will isolate the key bits of information about a system of equations into something called a matrix, and then use this matrix to systematically solve the equations. Along the way we will obtain one of our most important and useful computational tools.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
After solving a few systems of equations, you will recognize that it does not matter so much what we call our variables, as opposed to what numbers act as their coefficients. A system in the variables \(x_1,\,x_2,\,x_3\) would behave the same if we changed the names of the variables to \(a,\,b,\,c\) and kept all the constants the same and in the same places. In this section, we will isolate the key bits of information about a system of equations into something called a matrix, and then use this matrix to systematically solve the equations. Along the way we will obtain one of our most important and useful computational tools.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
After solving a few systems of equations, you will recognize that it does not matter so much what we call our variables, as opposed to what numbers act as their coefficients. A system in the variables \(x_1,\,x_2,\,x_3\) would behave the same if we changed the names of the variables to \(a,\,b,\,c\) and kept all the constants the same and in the same places. In this section, we will isolate the key bits of information about a system of equations into something called a matrix, and then use this matrix to systematically solve the equations. Along the way we will obtain one of our most important and useful computational tools.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We will now be more careful about analyzing the reduced row-echelon form derived from the augmented matrix of a system of linear equations. In particular, we will see how to systematically handle the situation when we have infinitely many solutions to a system, and we will prove that every system of linear equations has either zero, one or infinitely many solutions. With these tools, we will be able to routinely solve any linear system.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we specialize to systems of linear equations where every equation has a zero as its constant term. Along the way, we will begin to express more and more ideas in the language of matrices and begin a move away from writing out whole systems of equations. The ideas initiated in this section will carry through the remainder of the course.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we specialize to systems of linear equations where every equation has a zero as its constant term. Along the way, we will begin to express more and more ideas in the language of matrices and begin a move away from writing out whole systems of equations. The ideas initiated in this section will carry through the remainder of the course.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we specialize further and consider matrices with equal numbers of rows and columns, which when considered as coefficient matrices lead to systems with equal numbers of equations and variables. We will see in the second half of the course (Chapter D, Chapter E, Chapter LT, Chapter R) that these matrices are especially important.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we specialize further and consider matrices with equal numbers of rows and columns, which when considered as coefficient matrices lead to systems with equal numbers of equations and variables. We will see in the second half of the course (Chapter D, Chapter E, Chapter LT, Chapter R) that these matrices are especially important.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we specialize further and consider matrices with equal numbers of rows and columns, which when considered as coefficient matrices lead to systems with equal numbers of equations and variables. We will see in the second half of the course (Chapter D, Chapter E, Chapter LT, Chapter R) that these matrices are especially important.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we specialize further and consider matrices with equal numbers of rows and columns, which when considered as coefficient matrices lead to systems with equal numbers of equations and variables. We will see in the second half of the course (Chapter D, Chapter E, Chapter LT, Chapter R) that these matrices are especially important.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we specialize to systems of linear equations where every equation has a zero as its constant term. Along the way, we will begin to express more and more ideas in the language of matrices and begin a move away from writing out whole systems of equations. The ideas initiated in this section will carry through the remainder of the course.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We will now be more careful about analyzing the reduced row-echelon form derived from the augmented matrix of a system of linear equations. In particular, we will see how to systematically handle the situation when we have infinitely many solutions to a system, and we will prove that every system of linear equations has either zero, one or infinitely many solutions. With these tools, we will be able to routinely solve any linear system.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We will now be more careful about analyzing the reduced row-echelon form derived from the augmented matrix of a system of linear equations. In particular, we will see how to systematically handle the situation when we have infinitely many solutions to a system, and we will prove that every system of linear equations has either zero, one or infinitely many solutions. With these tools, we will be able to routinely solve any linear system.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we specialize further and consider matrices with equal numbers of rows and columns, which when considered as coefficient matrices lead to systems with equal numbers of equations and variables. We will see in the second half of the course (Chapter D, Chapter E, Chapter LT, Chapter R) that these matrices are especially important.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define some new operations involving vectors, and collect some basic properties of these operations. Begin by recalling our definition of a column vector as an ordered list of complex numbers, written vertically (Definition CV). The collection of all possible vectors of a fixed size is a commonly used set, so we start with its definition.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We will now be more careful about analyzing the reduced row-echelon form derived from the augmented matrix of a system of linear equations. In particular, we will see how to systematically handle the situation when we have infinitely many solutions to a system, and we will prove that every system of linear equations has either zero, one or infinitely many solutions. With these tools, we will be able to routinely solve any linear system.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define some new operations involving vectors, and collect some basic properties of these operations. Begin by recalling our definition of a column vector as an ordered list of complex numbers, written vertically (Definition CV). The collection of all possible vectors of a fixed size is a commonly used set, so we start with its definition.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we specialize further and consider matrices with equal numbers of rows and columns, which when considered as coefficient matrices lead to systems with equal numbers of equations and variables. We will see in the second half of the course (Chapter D, Chapter E, Chapter LT, Chapter R) that these matrices are especially important.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we specialize further and consider matrices with equal numbers of rows and columns, which when considered as coefficient matrices lead to systems with equal numbers of equations and variables. We will see in the second half of the course (Chapter D, Chapter E, Chapter LT, Chapter R) that these matrices are especially important.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define some new operations involving vectors, and collect some basic properties of these operations. Begin by recalling our definition of a column vector as an ordered list of complex numbers, written vertically (Definition CV). The collection of all possible vectors of a fixed size is a commonly used set, so we start with its definition.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In Section VO we defined vector addition and scalar multiplication. These two operations combine nicely to give us a construction known as a linear combination, a construct that we will work with throughout this course.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define a couple more operations with vectors, and prove a few theorems. At first blush these definitions and results will not appear central to what follows, but we will make use of them at key points in the remainder of the course (such as Section MINM, Section OD). Because we have chosen to use \(\complexes\) as our set of scalars, this subsection is a bit more, uh, … complex than it would be for the real numbers. We will explain as we go along how things get easier for the real numbers \({\mathbb R}\text{.}\) If you have not already, now would be a good time to review some of the basic properties of arithmetic with complex numbers described in Section CNO. With that done, we can extend the basics of complex number arithmetic to our study of vectors in \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Linear independence is one of the most fundamental conceptual ideas in linear algebra, along with the notion of a span. So this section, and the subsequent Section LDS, will explore this new idea.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will provide an extremely compact way to describe an infinite set of vectors, making use of linear combinations. This will give us a convenient way to describe the solution set of a linear system, the null space of a matrix, and many other sets of vectors.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define a couple more operations with vectors, and prove a few theorems. At first blush these definitions and results will not appear central to what follows, but we will make use of them at key points in the remainder of the course (such as Section MINM, Section OD). Because we have chosen to use \(\complexes\) as our set of scalars, this subsection is a bit more, uh, … complex than it would be for the real numbers. We will explain as we go along how things get easier for the real numbers \({\mathbb R}\text{.}\) If you have not already, now would be a good time to review some of the basic properties of arithmetic with complex numbers described in Section CNO. With that done, we can extend the basics of complex number arithmetic to our study of vectors in \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In any linearly dependent set there is always one vector that can be written as a linear combination of the others. This is the substance of the upcoming Theorem DLDS. Perhaps this will explain the use of the word “dependent.” In a linearly dependent set, at least one vector “depends” on the others (via a linear combination).
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Linear independence is one of the most fundamental conceptual ideas in linear algebra, along with the notion of a span. So this section, and the subsequent Section LDS, will explore this new idea.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Linear independence is one of the most fundamental conceptual ideas in linear algebra, along with the notion of a span. So this section, and the subsequent Section LDS, will explore this new idea.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Linear independence is one of the most fundamental conceptual ideas in linear algebra, along with the notion of a span. So this section, and the subsequent Section LDS, will explore this new idea.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define a couple more operations with vectors, and prove a few theorems. At first blush these definitions and results will not appear central to what follows, but we will make use of them at key points in the remainder of the course (such as Section MINM, Section OD). Because we have chosen to use \(\complexes\) as our set of scalars, this subsection is a bit more, uh, … complex than it would be for the real numbers. We will explain as we go along how things get easier for the real numbers \({\mathbb R}\text{.}\) If you have not already, now would be a good time to review some of the basic properties of arithmetic with complex numbers described in Section CNO. With that done, we can extend the basics of complex number arithmetic to our study of vectors in \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define some new operations involving vectors, and collect some basic properties of these operations. Begin by recalling our definition of a column vector as an ordered list of complex numbers, written vertically (Definition CV). The collection of all possible vectors of a fixed size is a commonly used set, so we start with its definition.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we specialize to systems of linear equations where every equation has a zero as its constant term. Along the way, we will begin to express more and more ideas in the language of matrices and begin a move away from writing out whole systems of equations. The ideas initiated in this section will carry through the remainder of the course.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define a couple more operations with vectors, and prove a few theorems. At first blush these definitions and results will not appear central to what follows, but we will make use of them at key points in the remainder of the course (such as Section MINM, Section OD). Because we have chosen to use \(\complexes\) as our set of scalars, this subsection is a bit more, uh, … complex than it would be for the real numbers. We will explain as we go along how things get easier for the real numbers \({\mathbb R}\text{.}\) If you have not already, now would be a good time to review some of the basic properties of arithmetic with complex numbers described in Section CNO. With that done, we can extend the basics of complex number arithmetic to our study of vectors in \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define a couple more operations with vectors, and prove a few theorems. At first blush these definitions and results will not appear central to what follows, but we will make use of them at key points in the remainder of the course (such as Section MINM, Section OD). Because we have chosen to use \(\complexes\) as our set of scalars, this subsection is a bit more, uh, … complex than it would be for the real numbers. We will explain as we go along how things get easier for the real numbers \({\mathbb R}\text{.}\) If you have not already, now would be a good time to review some of the basic properties of arithmetic with complex numbers described in Section CNO. With that done, we can extend the basics of complex number arithmetic to our study of vectors in \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define a couple more operations with vectors, and prove a few theorems. At first blush these definitions and results will not appear central to what follows, but we will make use of them at key points in the remainder of the course (such as Section MINM, Section OD). Because we have chosen to use \(\complexes\) as our set of scalars, this subsection is a bit more, uh, … complex than it would be for the real numbers. We will explain as we go along how things get easier for the real numbers \({\mathbb R}\text{.}\) If you have not already, now would be a good time to review some of the basic properties of arithmetic with complex numbers described in Section CNO. With that done, we can extend the basics of complex number arithmetic to our study of vectors in \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In Section VO we defined vector addition and scalar multiplication. These two operations combine nicely to give us a construction known as a linear combination, a construct that we will work with throughout this course.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
After solving a few systems of equations, you will recognize that it does not matter so much what we call our variables, as opposed to what numbers act as their coefficients. A system in the variables \(x_1,\,x_2,\,x_3\) would behave the same if we changed the names of the variables to \(a,\,b,\,c\) and kept all the constants the same and in the same places. In this section, we will isolate the key bits of information about a system of equations into something called a matrix, and then use this matrix to systematically solve the equations. Along the way we will obtain one of our most important and useful computational tools.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In any linearly dependent set there is always one vector that can be written as a linear combination of the others. This is the substance of the upcoming Theorem DLDS. Perhaps this will explain the use of the word “dependent.” In a linearly dependent set, at least one vector “depends” on the others (via a linear combination).
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define a couple more operations with vectors, and prove a few theorems. At first blush these definitions and results will not appear central to what follows, but we will make use of them at key points in the remainder of the course (such as Section MINM, Section OD). Because we have chosen to use \(\complexes\) as our set of scalars, this subsection is a bit more, uh, … complex than it would be for the real numbers. We will explain as we go along how things get easier for the real numbers \({\mathbb R}\text{.}\) If you have not already, now would be a good time to review some of the basic properties of arithmetic with complex numbers described in Section CNO. With that done, we can extend the basics of complex number arithmetic to our study of vectors in \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define a couple more operations with vectors, and prove a few theorems. At first blush these definitions and results will not appear central to what follows, but we will make use of them at key points in the remainder of the course (such as Section MINM, Section OD). Because we have chosen to use \(\complexes\) as our set of scalars, this subsection is a bit more, uh, … complex than it would be for the real numbers. We will explain as we go along how things get easier for the real numbers \({\mathbb R}\text{.}\) If you have not already, now would be a good time to review some of the basic properties of arithmetic with complex numbers described in Section CNO. With that done, we can extend the basics of complex number arithmetic to our study of vectors in \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will provide an extremely compact way to describe an infinite set of vectors, making use of linear combinations. This will give us a convenient way to describe the solution set of a linear system, the null space of a matrix, and many other sets of vectors.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In Section VO we defined vector addition and scalar multiplication. These two operations combine nicely to give us a construction known as a linear combination, a construct that we will work with throughout this course.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define a couple more operations with vectors, and prove a few theorems. At first blush these definitions and results will not appear central to what follows, but we will make use of them at key points in the remainder of the course (such as Section MINM, Section OD). Because we have chosen to use \(\complexes\) as our set of scalars, this subsection is a bit more, uh, … complex than it would be for the real numbers. We will explain as we go along how things get easier for the real numbers \({\mathbb R}\text{.}\) If you have not already, now would be a good time to review some of the basic properties of arithmetic with complex numbers described in Section CNO. With that done, we can extend the basics of complex number arithmetic to our study of vectors in \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Linear independence is one of the most fundamental conceptual ideas in linear algebra, along with the notion of a span. So this section, and the subsequent Section LDS, will explore this new idea.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In Section VO we defined vector addition and scalar multiplication. These two operations combine nicely to give us a construction known as a linear combination, a construct that we will work with throughout this course.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Linear independence is one of the most fundamental conceptual ideas in linear algebra, along with the notion of a span. So this section, and the subsequent Section LDS, will explore this new idea.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define a couple more operations with vectors, and prove a few theorems. At first blush these definitions and results will not appear central to what follows, but we will make use of them at key points in the remainder of the course (such as Section MINM, Section OD). Because we have chosen to use \(\complexes\) as our set of scalars, this subsection is a bit more, uh, … complex than it would be for the real numbers. We will explain as we go along how things get easier for the real numbers \({\mathbb R}\text{.}\) If you have not already, now would be a good time to review some of the basic properties of arithmetic with complex numbers described in Section CNO. With that done, we can extend the basics of complex number arithmetic to our study of vectors in \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define a couple more operations with vectors, and prove a few theorems. At first blush these definitions and results will not appear central to what follows, but we will make use of them at key points in the remainder of the course (such as Section MINM, Section OD). Because we have chosen to use \(\complexes\) as our set of scalars, this subsection is a bit more, uh, … complex than it would be for the real numbers. We will explain as we go along how things get easier for the real numbers \({\mathbb R}\text{.}\) If you have not already, now would be a good time to review some of the basic properties of arithmetic with complex numbers described in Section CNO. With that done, we can extend the basics of complex number arithmetic to our study of vectors in \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define a couple more operations with vectors, and prove a few theorems. At first blush these definitions and results will not appear central to what follows, but we will make use of them at key points in the remainder of the course (such as Section MINM, Section OD). Because we have chosen to use \(\complexes\) as our set of scalars, this subsection is a bit more, uh, … complex than it would be for the real numbers. We will explain as we go along how things get easier for the real numbers \({\mathbb R}\text{.}\) If you have not already, now would be a good time to review some of the basic properties of arithmetic with complex numbers described in Section CNO. With that done, we can extend the basics of complex number arithmetic to our study of vectors in \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Linear independence is one of the most fundamental conceptual ideas in linear algebra, along with the notion of a span. So this section, and the subsequent Section LDS, will explore this new idea.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
After solving a few systems of equations, you will recognize that it does not matter so much what we call our variables, as opposed to what numbers act as their coefficients. A system in the variables \(x_1,\,x_2,\,x_3\) would behave the same if we changed the names of the variables to \(a,\,b,\,c\) and kept all the constants the same and in the same places. In this section, we will isolate the key bits of information about a system of equations into something called a matrix, and then use this matrix to systematically solve the equations. Along the way we will obtain one of our most important and useful computational tools.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define a couple more operations with vectors, and prove a few theorems. At first blush these definitions and results will not appear central to what follows, but we will make use of them at key points in the remainder of the course (such as Section MINM, Section OD). Because we have chosen to use \(\complexes\) as our set of scalars, this subsection is a bit more, uh, … complex than it would be for the real numbers. We will explain as we go along how things get easier for the real numbers \({\mathbb R}\text{.}\) If you have not already, now would be a good time to review some of the basic properties of arithmetic with complex numbers described in Section CNO. With that done, we can extend the basics of complex number arithmetic to our study of vectors in \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define a couple more operations with vectors, and prove a few theorems. At first blush these definitions and results will not appear central to what follows, but we will make use of them at key points in the remainder of the course (such as Section MINM, Section OD). Because we have chosen to use \(\complexes\) as our set of scalars, this subsection is a bit more, uh, … complex than it would be for the real numbers. We will explain as we go along how things get easier for the real numbers \({\mathbb R}\text{.}\) If you have not already, now would be a good time to review some of the basic properties of arithmetic with complex numbers described in Section CNO. With that done, we can extend the basics of complex number arithmetic to our study of vectors in \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define a couple more operations with vectors, and prove a few theorems. At first blush these definitions and results will not appear central to what follows, but we will make use of them at key points in the remainder of the course (such as Section MINM, Section OD). Because we have chosen to use \(\complexes\) as our set of scalars, this subsection is a bit more, uh, … complex than it would be for the real numbers. We will explain as we go along how things get easier for the real numbers \({\mathbb R}\text{.}\) If you have not already, now would be a good time to review some of the basic properties of arithmetic with complex numbers described in Section CNO. With that done, we can extend the basics of complex number arithmetic to our study of vectors in \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define some new operations involving vectors, and collect some basic properties of these operations. Begin by recalling our definition of a column vector as an ordered list of complex numbers, written vertically (Definition CV). The collection of all possible vectors of a fixed size is a commonly used set, so we start with its definition.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We know how to add vectors and how to multiply them by scalars. Together, these operations give us the possibility of making linear combinations. Similarly, we know how to add matrices and how to multiply matrices by scalars. In this section we mix all these ideas together and produce an operation known as matrix multiplication. This will lead to some results that are both surprising and central. We begin with a definition of how to multiply a vector by a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We know how to add vectors and how to multiply them by scalars. Together, these operations give us the possibility of making linear combinations. Similarly, we know how to add matrices and how to multiply matrices by scalars. In this section we mix all these ideas together and produce an operation known as matrix multiplication. This will lead to some results that are both surprising and central. We begin with a definition of how to multiply a vector by a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The inverse of a square matrix, and solutions to linear systems with square coefficient matrices, are intimately connected.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We know how to add vectors and how to multiply them by scalars. Together, these operations give us the possibility of making linear combinations. Similarly, we know how to add matrices and how to multiply matrices by scalars. In this section we mix all these ideas together and produce an operation known as matrix multiplication. This will lead to some results that are both surprising and central. We begin with a definition of how to multiply a vector by a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We know how to add vectors and how to multiply them by scalars. Together, these operations give us the possibility of making linear combinations. Similarly, we know how to add matrices and how to multiply matrices by scalars. In this section we mix all these ideas together and produce an operation known as matrix multiplication. This will lead to some results that are both surprising and central. We begin with a definition of how to multiply a vector by a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We saw in Theorem CINM that if a square matrix \(A\) is nonsingular, then there is a matrix \(B\) so that \(AB=I_n\text{.}\) In other words, \(B\) is halfway to being an inverse of \(A\text{.}\) We will see in this section that \(B\) automatically fulfills the second condition (\(BA=I_n\)). Example MWIAA showed us that the coefficient matrix from Archetype A had no inverse. Not coincidentally, this coefficient matrix is singular. We will make all these connections precise now. Not many examples or definitions in this section, just theorems.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We know how to add vectors and how to multiply them by scalars. Together, these operations give us the possibility of making linear combinations. Similarly, we know how to add matrices and how to multiply matrices by scalars. In this section we mix all these ideas together and produce an operation known as matrix multiplication. This will lead to some results that are both surprising and central. We begin with a definition of how to multiply a vector by a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The inverse of a square matrix, and solutions to linear systems with square coefficient matrices, are intimately connected.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We saw in Theorem CINM that if a square matrix \(A\) is nonsingular, then there is a matrix \(B\) so that \(AB=I_n\text{.}\) In other words, \(B\) is halfway to being an inverse of \(A\text{.}\) We will see in this section that \(B\) automatically fulfills the second condition (\(BA=I_n\)). Example MWIAA showed us that the coefficient matrix from Archetype A had no inverse. Not coincidentally, this coefficient matrix is singular. We will make all these connections precise now. Not many examples or definitions in this section, just theorems.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We saw in Theorem CINM that if a square matrix \(A\) is nonsingular, then there is a matrix \(B\) so that \(AB=I_n\text{.}\) In other words, \(B\) is halfway to being an inverse of \(A\text{.}\) We will see in this section that \(B\) automatically fulfills the second condition (\(BA=I_n\)). Example MWIAA showed us that the coefficient matrix from Archetype A had no inverse. Not coincidentally, this coefficient matrix is singular. We will make all these connections precise now. Not many examples or definitions in this section, just theorems.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We know how to add vectors and how to multiply them by scalars. Together, these operations give us the possibility of making linear combinations. Similarly, we know how to add matrices and how to multiply matrices by scalars. In this section we mix all these ideas together and produce an operation known as matrix multiplication. This will lead to some results that are both surprising and central. We begin with a definition of how to multiply a vector by a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We know how to add vectors and how to multiply them by scalars. Together, these operations give us the possibility of making linear combinations. Similarly, we know how to add matrices and how to multiply matrices by scalars. In this section we mix all these ideas together and produce an operation known as matrix multiplication. This will lead to some results that are both surprising and central. We begin with a definition of how to multiply a vector by a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We saw in Theorem CINM that if a square matrix \(A\) is nonsingular, then there is a matrix \(B\) so that \(AB=I_n\text{.}\) In other words, \(B\) is halfway to being an inverse of \(A\text{.}\) We will see in this section that \(B\) automatically fulfills the second condition (\(BA=I_n\)). Example MWIAA showed us that the coefficient matrix from Archetype A had no inverse. Not coincidentally, this coefficient matrix is singular. We will make all these connections precise now. Not many examples or definitions in this section, just theorems.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We saw in Theorem CINM that if a square matrix \(A\) is nonsingular, then there is a matrix \(B\) so that \(AB=I_n\text{.}\) In other words, \(B\) is halfway to being an inverse of \(A\text{.}\) We will see in this section that \(B\) automatically fulfills the second condition (\(BA=I_n\)). Example MWIAA showed us that the coefficient matrix from Archetype A had no inverse. Not coincidentally, this coefficient matrix is singular. We will make all these connections precise now. Not many examples or definitions in this section, just theorems.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A matrix-vector product (Definition MVP) is a linear combination of the columns of the matrix and this allows us to connect matrix multiplication with systems of equations via Theorem SLSLC. Row operations are linear combinations of the rows of a matrix, and of course, reduced row-echelon form (Definition RREF) is also intimately related to solving systems of equations. In this section we will formalize these ideas with two key definitions of sets of vectors derived from a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 4
- Type
- Textbook
- Language
- English
- Content Type
- text/html
There are four natural subsets associated with a matrix. We have met three already: the null space, the column space and the row space. In this section we will introduce a fourth, the left null space. The objective of this section is to describe one procedure that will allow us to find linearly independent sets that span each of these four sets of column vectors. Along the way, we will make a connection with the inverse of a matrix, so Theorem FS will tie together most all of this chapter (and the entire course so far).
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We know how to add vectors and how to multiply them by scalars. Together, these operations give us the possibility of making linear combinations. Similarly, we know how to add matrices and how to multiply matrices by scalars. In this section we mix all these ideas together and produce an operation known as matrix multiplication. This will lead to some results that are both surprising and central. We begin with a definition of how to multiply a vector by a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we present a formal definition of a vector space, which will lead to an extra increment of abstraction. Once defined, we study its most basic properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we define a couple more operations with vectors, and prove a few theorems. At first blush these definitions and results will not appear central to what follows, but we will make use of them at key points in the remainder of the course (such as Section MINM, Section OD). Because we have chosen to use \(\complexes\) as our set of scalars, this subsection is a bit more, uh, … complex than it would be for the real numbers. We will explain as we go along how things get easier for the real numbers \({\mathbb R}\text{.}\) If you have not already, now would be a good time to review some of the basic properties of arithmetic with complex numbers described in Section CNO. With that done, we can extend the basics of complex number arithmetic to our study of vectors in \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The inverse of a square matrix, and solutions to linear systems with square coefficient matrices, are intimately connected.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The inverse of a square matrix, and solutions to linear systems with square coefficient matrices, are intimately connected.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
There are four natural subsets associated with a matrix. We have met three already: the null space, the column space and the row space. In this section we will introduce a fourth, the left null space. The objective of this section is to describe one procedure that will allow us to find linearly independent sets that span each of these four sets of column vectors. Along the way, we will make a connection with the inverse of a matrix, so Theorem FS will tie together most all of this chapter (and the entire course so far).
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we present a formal definition of a vector space, which will lead to an extra increment of abstraction. Once defined, we study its most basic properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we present a formal definition of a vector space, which will lead to an extra increment of abstraction. Once defined, we study its most basic properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we present a formal definition of a vector space, which will lead to an extra increment of abstraction. Once defined, we study its most basic properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A subspace is a vector space that is contained within another vector space. So every subspace is a vector space in its own right, but it is also defined relative to some other (larger) vector space. We will discover shortly that we are already familiar with a wide variety of subspaces from previous sections.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A matrix-vector product (Definition MVP) is a linear combination of the columns of the matrix and this allows us to connect matrix multiplication with systems of equations via Theorem SLSLC. Row operations are linear combinations of the rows of a matrix, and of course, reduced row-echelon form (Definition RREF) is also intimately related to solving systems of equations. In this section we will formalize these ideas with two key definitions of sets of vectors derived from a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A matrix-vector product (Definition MVP) is a linear combination of the columns of the matrix and this allows us to connect matrix multiplication with systems of equations via Theorem SLSLC. Row operations are linear combinations of the rows of a matrix, and of course, reduced row-echelon form (Definition RREF) is also intimately related to solving systems of equations. In this section we will formalize these ideas with two key definitions of sets of vectors derived from a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we present a formal definition of a vector space, which will lead to an extra increment of abstraction. Once defined, we study its most basic properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we present a formal definition of a vector space, which will lead to an extra increment of abstraction. Once defined, we study its most basic properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we present a formal definition of a vector space, which will lead to an extra increment of abstraction. Once defined, we study its most basic properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A subspace is a vector space that is contained within another vector space. So every subspace is a vector space in its own right, but it is also defined relative to some other (larger) vector space. We will discover shortly that we are already familiar with a wide variety of subspaces from previous sections.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A subspace is a vector space that is contained within another vector space. So every subspace is a vector space in its own right, but it is also defined relative to some other (larger) vector space. We will discover shortly that we are already familiar with a wide variety of subspaces from previous sections.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Linear independence is one of the most fundamental conceptual ideas in linear algebra, along with the notion of a span. So this section, and the subsequent Section LDS, will explore this new idea.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
This section's topic will perhaps seem out of place at first, but we will make the connection soon with eigenvalues and eigenvectors. This is also our first look at one of the central ideas of Chapter R.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will back up and start simple. We begin with a definition of a totally general set of matrices, and see where that takes us.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Almost every vector space we have encountered has been infinite in size (an exception is Example VSS). But some are bigger and richer than others. Dimension, once suitably defined, will be a measure of the size of a vector space, and a useful tool for studying its properties. You probably already have a rough notion of what a mathematical definition of dimension might be — try to forget these imprecise ideas and go with the new ones given here.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A vector space is defined as a set with two operations, meeting ten properties (Definition VS). Just as the definition of span of a set of vectors only required knowing how to add vectors and how to multiply vectors by scalars, so it is with linear independence. A definition of a linearly independent set of vectors in an arbitrary vector space only requires knowing how to form linear combinations and equating these with the zero vector. Since every vector space must have a zero vector (Property Z), we always have a zero vector at our disposal.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We know how to add vectors and how to multiply them by scalars. Together, these operations give us the possibility of making linear combinations. Similarly, we know how to add matrices and how to multiply matrices by scalars. In this section we mix all these ideas together and produce an operation known as matrix multiplication. This will lead to some results that are both surprising and central. We begin with a definition of how to multiply a vector by a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Almost every vector space we have encountered has been infinite in size (an exception is Example VSS). But some are bigger and richer than others. Dimension, once suitably defined, will be a measure of the size of a vector space, and a useful tool for studying its properties. You probably already have a rough notion of what a mathematical definition of dimension might be — try to forget these imprecise ideas and go with the new ones given here.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A subspace is a vector space that is contained within another vector space. So every subspace is a vector space in its own right, but it is also defined relative to some other (larger) vector space. We will discover shortly that we are already familiar with a wide variety of subspaces from previous sections.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A vector space is defined as a set with two operations, meeting ten properties (Definition VS). Just as the definition of span of a set of vectors only required knowing how to add vectors and how to multiply vectors by scalars, so it is with linear independence. A definition of a linearly independent set of vectors in an arbitrary vector space only requires knowing how to form linear combinations and equating these with the zero vector. Since every vector space must have a zero vector (Property Z), we always have a zero vector at our disposal.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Early in Chapter VS we prefaced the definition of a vector space with the comment that it was “one of the two most important definitions in the entire course.” Here comes the other. Any capsule summary of linear algebra would have to describe the subject as the interplay of linear transformations and vector spaces. Here we go.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Before we define the determinant of a matrix, we take a slight detour to introduce elementary matrices. These will bring us back to the beginning of the course and our old friend, row operations.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section, we will define the eigenvalues and eigenvectors of a matrix, and see how to compute them. More theoretical properties will be taken up in the next section.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Almost every vector space we have encountered has been infinite in size (an exception is Example VSS). But some are bigger and richer than others. Dimension, once suitably defined, will be a measure of the size of a vector space, and a useful tool for studying its properties. You probably already have a rough notion of what a mathematical definition of dimension might be — try to forget these imprecise ideas and go with the new ones given here.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Once the dimension of a vector space is known, then the determination of whether or not a set of vectors is linearly independent, or if it spans the vector space, can often be much easier. In this section we will state a workhorse theorem and then apply it to the column space and row space of a matrix. It will also help us describe a super-basis for \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A basis of a vector space is one of the most useful concepts in linear algebra. It often provides a concise, finite description of an infinite vector space.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Before we define the determinant of a matrix, we take a slight detour to introduce elementary matrices. These will bring us back to the beginning of the course and our old friend, row operations.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We know how to add vectors and how to multiply them by scalars. Together, these operations give us the possibility of making linear combinations. Similarly, we know how to add matrices and how to multiply matrices by scalars. In this section we mix all these ideas together and produce an operation known as matrix multiplication. This will lead to some results that are both surprising and central. We begin with a definition of how to multiply a vector by a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Once the dimension of a vector space is known, then the determination of whether or not a set of vectors is linearly independent, or if it spans the vector space, can often be much easier. In this section we will state a workhorse theorem and then apply it to the column space and row space of a matrix. It will also help us describe a super-basis for \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A subspace is a vector space that is contained within another vector space. So every subspace is a vector space in its own right, but it is also defined relative to some other (larger) vector space. We will discover shortly that we are already familiar with a wide variety of subspaces from previous sections.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A basis of a vector space is one of the most useful concepts in linear algebra. It often provides a concise, finite description of an infinite vector space.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Once the dimension of a vector space is known, then the determination of whether or not a set of vectors is linearly independent, or if it spans the vector space, can often be much easier. In this section we will state a workhorse theorem and then apply it to the column space and row space of a matrix. It will also help us describe a super-basis for \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Before we define the determinant of a matrix, we take a slight detour to introduce elementary matrices. These will bring us back to the beginning of the course and our old friend, row operations.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Once the dimension of a vector space is known, then the determination of whether or not a set of vectors is linearly independent, or if it spans the vector space, can often be much easier. In this section we will state a workhorse theorem and then apply it to the column space and row space of a matrix. It will also help us describe a super-basis for \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section, we will define the eigenvalues and eigenvectors of a matrix, and see how to compute them. More theoretical properties will be taken up in the next section.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A basis of a vector space is one of the most useful concepts in linear algebra. It often provides a concise, finite description of an infinite vector space.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Some linear transformations possess one, or both, of two key properties, which go by the names injective and surjective. We will see that they are closely related to ideas like linear independence and spanning, and subspaces like the null space and the column space. In this section we will define an injective linear transformation and analyze the resulting consequences. The next section will do the same for the surjective property. In the final section of this chapter we will see what happens when we have the two properties simultaneously.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Once the dimension of a vector space is known, then the determination of whether or not a set of vectors is linearly independent, or if it spans the vector space, can often be much easier. In this section we will state a workhorse theorem and then apply it to the column space and row space of a matrix. It will also help us describe a super-basis for \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section, we will define the eigenvalues and eigenvectors of a matrix, and see how to compute them. More theoretical properties will be taken up in the next section.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Before we define the determinant of a matrix, we take a slight detour to introduce elementary matrices. These will bring us back to the beginning of the course and our old friend, row operations.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section, we will define the eigenvalues and eigenvectors of a matrix, and see how to compute them. More theoretical properties will be taken up in the next section.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen how to compute the determinant of a matrix, and the incredible fact that we can perform expansion about any row or column to make this computation. In this largely theoretical section, we will state and prove several more intriguing properties about determinants. Our main goal will be the two results in Theorem SMZD and Theorem DRMM, but more specifically, we will see how the value of a determinant will allow us to gain insight into the various properties of a square matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Before we define the determinant of a matrix, we take a slight detour to introduce elementary matrices. These will bring us back to the beginning of the course and our old friend, row operations.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen how to compute the determinant of a matrix, and the incredible fact that we can perform expansion about any row or column to make this computation. In this largely theoretical section, we will state and prove several more intriguing properties about determinants. Our main goal will be the two results in Theorem SMZD and Theorem DRMM, but more specifically, we will see how the value of a determinant will allow us to gain insight into the various properties of a square matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A basis of a vector space is one of the most useful concepts in linear algebra. It often provides a concise, finite description of an infinite vector space.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen how to compute the determinant of a matrix, and the incredible fact that we can perform expansion about any row or column to make this computation. In this largely theoretical section, we will state and prove several more intriguing properties about determinants. Our main goal will be the two results in Theorem SMZD and Theorem DRMM, but more specifically, we will see how the value of a determinant will allow us to gain insight into the various properties of a square matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section, we will define the eigenvalues and eigenvectors of a matrix, and see how to compute them. More theoretical properties will be taken up in the next section.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
This section's topic will perhaps seem out of place at first, but we will make the connection soon with eigenvalues and eigenvectors. This is also our first look at one of the central ideas of Chapter R.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen in Section SD that under the right conditions a square matrix is similar to a diagonal matrix. We recognize now, via Theorem SCB, that a similarity transformation is a change of basis on a matrix representation. So we can now discuss the choice of a basis used to build a matrix representation, and decide if some bases are better than others for this purpose. This will be the tone of this section. We will also see that every matrix has a reasonably useful matrix representation, and we will discover a new class of diagonalizable linear transformations. First we need some basic facts about triangular matrices.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The previous section introduced eigenvalues and eigenvectors, and concentrated on their existence and determination. This section will be more about theorems, and the various properties eigenvalues and eigenvectors enjoy. Like a good 4×100 meter relay, we will lead-off with one of our better theorems and save the very best for the anchor leg.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The previous section introduced eigenvalues and eigenvectors, and concentrated on their existence and determination. This section will be more about theorems, and the various properties eigenvalues and eigenvectors enjoy. Like a good 4×100 meter relay, we will lead-off with one of our better theorems and save the very best for the anchor leg.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
This section's topic will perhaps seem out of place at first, but we will make the connection soon with eigenvalues and eigenvectors. This is also our first look at one of the central ideas of Chapter R.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The previous section introduced eigenvalues and eigenvectors, and concentrated on their existence and determination. This section will be more about theorems, and the various properties eigenvalues and eigenvectors enjoy. Like a good 4×100 meter relay, we will lead-off with one of our better theorems and save the very best for the anchor leg.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We know how to add vectors and how to multiply them by scalars. Together, these operations give us the possibility of making linear combinations. Similarly, we know how to add matrices and how to multiply matrices by scalars. In this section we mix all these ideas together and produce an operation known as matrix multiplication. This will lead to some results that are both surprising and central. We begin with a definition of how to multiply a vector by a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Some linear transformations possess one, or both, of two key properties, which go by the names injective and surjective. We will see that they are closely related to ideas like linear independence and spanning, and subspaces like the null space and the column space. In this section we will define an injective linear transformation and analyze the resulting consequences. The next section will do the same for the surjective property. In the final section of this chapter we will see what happens when we have the two properties simultaneously.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We know how to add vectors and how to multiply them by scalars. Together, these operations give us the possibility of making linear combinations. Similarly, we know how to add matrices and how to multiply matrices by scalars. In this section we mix all these ideas together and produce an operation known as matrix multiplication. This will lead to some results that are both surprising and central. We begin with a definition of how to multiply a vector by a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The previous section introduced eigenvalues and eigenvectors, and concentrated on their existence and determination. This section will be more about theorems, and the various properties eigenvalues and eigenvectors enjoy. Like a good 4×100 meter relay, we will lead-off with one of our better theorems and save the very best for the anchor leg.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A vector space is defined as a set with two operations, meeting ten properties (Definition VS). Just as the definition of span of a set of vectors only required knowing how to add vectors and how to multiply vectors by scalars, so it is with linear independence. A definition of a linearly independent set of vectors in an arbitrary vector space only requires knowing how to form linear combinations and equating these with the zero vector. Since every vector space must have a zero vector (Property Z), we always have a zero vector at our disposal.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we present a formal definition of a vector space, which will lead to an extra increment of abstraction. Once defined, we study its most basic properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The companion to an injection is a surjection. Surjective linear transformations are closely related to spanning sets and ranges. So as you read this section reflect back on Section ILT and note the parallels and the contrasts. In the next section, Section IVLT, we will combine the two properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen in Section SD that under the right conditions a square matrix is similar to a diagonal matrix. We recognize now, via Theorem SCB, that a similarity transformation is a change of basis on a matrix representation. So we can now discuss the choice of a basis used to build a matrix representation, and decide if some bases are better than others for this purpose. This will be the tone of this section. We will also see that every matrix has a reasonably useful matrix representation, and we will discover a new class of diagonalizable linear transformations. First we need some basic facts about triangular matrices.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Before we define the determinant of a matrix, we take a slight detour to introduce elementary matrices. These will bring us back to the beginning of the course and our old friend, row operations.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
There are four natural subsets associated with a matrix. We have met three already: the null space, the column space and the row space. In this section we will introduce a fourth, the left null space. The objective of this section is to describe one procedure that will allow us to find linearly independent sets that span each of these four sets of column vectors. Along the way, we will make a connection with the inverse of a matrix, so Theorem FS will tie together most all of this chapter (and the entire course so far).
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We know how to add vectors and how to multiply them by scalars. Together, these operations give us the possibility of making linear combinations. Similarly, we know how to add matrices and how to multiply matrices by scalars. In this section we mix all these ideas together and produce an operation known as matrix multiplication. This will lead to some results that are both surprising and central. We begin with a definition of how to multiply a vector by a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The companion to an injection is a surjection. Surjective linear transformations are closely related to spanning sets and ranges. So as you read this section reflect back on Section ILT and note the parallels and the contrasts. In the next section, Section IVLT, we will combine the two properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Almost every vector space we have encountered has been infinite in size (an exception is Example VSS). But some are bigger and richer than others. Dimension, once suitably defined, will be a measure of the size of a vector space, and a useful tool for studying its properties. You probably already have a rough notion of what a mathematical definition of dimension might be — try to forget these imprecise ideas and go with the new ones given here.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A matrix-vector product (Definition MVP) is a linear combination of the columns of the matrix and this allows us to connect matrix multiplication with systems of equations via Theorem SLSLC. Row operations are linear combinations of the rows of a matrix, and of course, reduced row-echelon form (Definition RREF) is also intimately related to solving systems of equations. In this section we will formalize these ideas with two key definitions of sets of vectors derived from a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section, we will define the eigenvalues and eigenvectors of a matrix, and see how to compute them. More theoretical properties will be taken up in the next section.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen how to compute the determinant of a matrix, and the incredible fact that we can perform expansion about any row or column to make this computation. In this largely theoretical section, we will state and prove several more intriguing properties about determinants. Our main goal will be the two results in Theorem SMZD and Theorem DRMM, but more specifically, we will see how the value of a determinant will allow us to gain insight into the various properties of a square matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we present a formal definition of a vector space, which will lead to an extra increment of abstraction. Once defined, we study its most basic properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen how to compute the determinant of a matrix, and the incredible fact that we can perform expansion about any row or column to make this computation. In this largely theoretical section, we will state and prove several more intriguing properties about determinants. Our main goal will be the two results in Theorem SMZD and Theorem DRMM, but more specifically, we will see how the value of a determinant will allow us to gain insight into the various properties of a square matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen in Section SD that under the right conditions a square matrix is similar to a diagonal matrix. We recognize now, via Theorem SCB, that a similarity transformation is a change of basis on a matrix representation. So we can now discuss the choice of a basis used to build a matrix representation, and decide if some bases are better than others for this purpose. This will be the tone of this section. We will also see that every matrix has a reasonably useful matrix representation, and we will discover a new class of diagonalizable linear transformations. First we need some basic facts about triangular matrices.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Before we define the determinant of a matrix, we take a slight detour to introduce elementary matrices. These will bring us back to the beginning of the course and our old friend, row operations.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The inverse of a square matrix, and solutions to linear systems with square coefficient matrices, are intimately connected.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Early in Chapter VS we prefaced the definition of a vector space with the comment that it was “one of the two most important definitions in the entire course.” Here comes the other. Any capsule summary of linear algebra would have to describe the subject as the interplay of linear transformations and vector spaces. Here we go.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We know how to add vectors and how to multiply them by scalars. Together, these operations give us the possibility of making linear combinations. Similarly, we know how to add matrices and how to multiply matrices by scalars. In this section we mix all these ideas together and produce an operation known as matrix multiplication. This will lead to some results that are both surprising and central. We begin with a definition of how to multiply a vector by a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will conclude our introduction to linear transformations by bringing together the twin properties of injectivity and surjectivity and consider linear transformations with both of these properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Early in Chapter VS we prefaced the definition of a vector space with the comment that it was “one of the two most important definitions in the entire course.” Here comes the other. Any capsule summary of linear algebra would have to describe the subject as the interplay of linear transformations and vector spaces. Here we go.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
You may have noticed that many questions about elements of abstract vector spaces eventually become questions about column vectors or systems of equations. Example SM32 would be an example of this. We will make this vague idea more precise in this section.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The inverse of a square matrix, and solutions to linear systems with square coefficient matrices, are intimately connected.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section, we will define the eigenvalues and eigenvectors of a matrix, and see how to compute them. More theoretical properties will be taken up in the next section.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we present a formal definition of a vector space, which will lead to an extra increment of abstraction. Once defined, we study its most basic properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Early in Chapter VS we prefaced the definition of a vector space with the comment that it was “one of the two most important definitions in the entire course.” Here comes the other. Any capsule summary of linear algebra would have to describe the subject as the interplay of linear transformations and vector spaces. Here we go.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We saw in Theorem CINM that if a square matrix \(A\) is nonsingular, then there is a matrix \(B\) so that \(AB=I_n\text{.}\) In other words, \(B\) is halfway to being an inverse of \(A\text{.}\) We will see in this section that \(B\) automatically fulfills the second condition (\(BA=I_n\)). Example MWIAA showed us that the coefficient matrix from Archetype A had no inverse. Not coincidentally, this coefficient matrix is singular. We will make all these connections precise now. Not many examples or definitions in this section, just theorems.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Before we define the determinant of a matrix, we take a slight detour to introduce elementary matrices. These will bring us back to the beginning of the course and our old friend, row operations.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Early in Chapter VS we prefaced the definition of a vector space with the comment that it was “one of the two most important definitions in the entire course.” Here comes the other. Any capsule summary of linear algebra would have to describe the subject as the interplay of linear transformations and vector spaces. Here we go.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The companion to an injection is a surjection. Surjective linear transformations are closely related to spanning sets and ranges. So as you read this section reflect back on Section ILT and note the parallels and the contrasts. In the next section, Section IVLT, we will combine the two properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A subspace is a vector space that is contained within another vector space. So every subspace is a vector space in its own right, but it is also defined relative to some other (larger) vector space. We will discover shortly that we are already familiar with a wide variety of subspaces from previous sections.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will conclude our introduction to linear transformations by bringing together the twin properties of injectivity and surjectivity and consider linear transformations with both of these properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will conclude our introduction to linear transformations by bringing together the twin properties of injectivity and surjectivity and consider linear transformations with both of these properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen in Section MR that a linear transformation can be represented by a matrix, once we pick bases for the domain and codomain. How does the matrix representation change if we choose different bases? Which bases lead to especially nice representations? From the infinite possibilities, what is the best possible representation? This section will begin to answer these questions. But first we need to define eigenvalues for linear transformations and the change-of-basis matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen how to compute the determinant of a matrix, and the incredible fact that we can perform expansion about any row or column to make this computation. In this largely theoretical section, we will state and prove several more intriguing properties about determinants. Our main goal will be the two results in Theorem SMZD and Theorem DRMM, but more specifically, we will see how the value of a determinant will allow us to gain insight into the various properties of a square matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
You may have noticed that many questions about elements of abstract vector spaces eventually become questions about column vectors or systems of equations. Example SM32 would be an example of this. We will make this vague idea more precise in this section.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will conclude our introduction to linear transformations by bringing together the twin properties of injectivity and surjectivity and consider linear transformations with both of these properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The previous section introduced eigenvalues and eigenvectors, and concentrated on their existence and determination. This section will be more about theorems, and the various properties eigenvalues and eigenvectors enjoy. Like a good 4×100 meter relay, we will lead-off with one of our better theorems and save the very best for the anchor leg.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen that linear transformations whose domain and codomain are vector spaces of columns vectors have a close relationship with matrices (Theorem MBLT, Theorem MLTCV). In this section, we will extend the relationship between matrices and linear transformations to the setting of linear transformations between abstract vector spaces.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will conclude our introduction to linear transformations by bringing together the twin properties of injectivity and surjectivity and consider linear transformations with both of these properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen that linear transformations whose domain and codomain are vector spaces of columns vectors have a close relationship with matrices (Theorem MBLT, Theorem MLTCV). In this section, we will extend the relationship between matrices and linear transformations to the setting of linear transformations between abstract vector spaces.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Early in Chapter VS we prefaced the definition of a vector space with the comment that it was “one of the two most important definitions in the entire course.” Here comes the other. Any capsule summary of linear algebra would have to describe the subject as the interplay of linear transformations and vector spaces. Here we go.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Early in Chapter VS we prefaced the definition of a vector space with the comment that it was “one of the two most important definitions in the entire course.” Here comes the other. Any capsule summary of linear algebra would have to describe the subject as the interplay of linear transformations and vector spaces. Here we go.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The previous section introduced eigenvalues and eigenvectors, and concentrated on their existence and determination. This section will be more about theorems, and the various properties eigenvalues and eigenvectors enjoy. Like a good 4×100 meter relay, we will lead-off with one of our better theorems and save the very best for the anchor leg.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen in Section MR that a linear transformation can be represented by a matrix, once we pick bases for the domain and codomain. How does the matrix representation change if we choose different bases? Which bases lead to especially nice representations? From the infinite possibilities, what is the best possible representation? This section will begin to answer these questions. But first we need to define eigenvalues for linear transformations and the change-of-basis matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen in Section MR that a linear transformation can be represented by a matrix, once we pick bases for the domain and codomain. How does the matrix representation change if we choose different bases? Which bases lead to especially nice representations? From the infinite possibilities, what is the best possible representation? This section will begin to answer these questions. But first we need to define eigenvalues for linear transformations and the change-of-basis matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will conclude our introduction to linear transformations by bringing together the twin properties of injectivity and surjectivity and consider linear transformations with both of these properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Early in Chapter VS we prefaced the definition of a vector space with the comment that it was “one of the two most important definitions in the entire course.” Here comes the other. Any capsule summary of linear algebra would have to describe the subject as the interplay of linear transformations and vector spaces. Here we go.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The inverse of a square matrix, and solutions to linear systems with square coefficient matrices, are intimately connected.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The previous section introduced eigenvalues and eigenvectors, and concentrated on their existence and determination. This section will be more about theorems, and the various properties eigenvalues and eigenvectors enjoy. Like a good 4×100 meter relay, we will lead-off with one of our better theorems and save the very best for the anchor leg.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen in Section SD that under the right conditions a square matrix is similar to a diagonal matrix. We recognize now, via Theorem SCB, that a similarity transformation is a change of basis on a matrix representation. So we can now discuss the choice of a basis used to build a matrix representation, and decide if some bases are better than others for this purpose. This will be the tone of this section. We will also see that every matrix has a reasonably useful matrix representation, and we will discover a new class of diagonalizable linear transformations. First we need some basic facts about triangular matrices.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will conclude our introduction to linear transformations by bringing together the twin properties of injectivity and surjectivity and consider linear transformations with both of these properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Some linear transformations possess one, or both, of two key properties, which go by the names injective and surjective. We will see that they are closely related to ideas like linear independence and spanning, and subspaces like the null space and the column space. In this section we will define an injective linear transformation and analyze the resulting consequences. The next section will do the same for the surjective property. In the final section of this chapter we will see what happens when we have the two properties simultaneously.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The previous section introduced eigenvalues and eigenvectors, and concentrated on their existence and determination. This section will be more about theorems, and the various properties eigenvalues and eigenvectors enjoy. Like a good 4×100 meter relay, we will lead-off with one of our better theorems and save the very best for the anchor leg.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
This section's topic will perhaps seem out of place at first, but we will make the connection soon with eigenvalues and eigenvectors. This is also our first look at one of the central ideas of Chapter R.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The companion to an injection is a surjection. Surjective linear transformations are closely related to spanning sets and ranges. So as you read this section reflect back on Section ILT and note the parallels and the contrasts. In the next section, Section IVLT, we will combine the two properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Early in Chapter VS we prefaced the definition of a vector space with the comment that it was “one of the two most important definitions in the entire course.” Here comes the other. Any capsule summary of linear algebra would have to describe the subject as the interplay of linear transformations and vector spaces. Here we go.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
You may have noticed that many questions about elements of abstract vector spaces eventually become questions about column vectors or systems of equations. Example SM32 would be an example of this. We will make this vague idea more precise in this section.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Early in Chapter VS we prefaced the definition of a vector space with the comment that it was “one of the two most important definitions in the entire course.” Here comes the other. Any capsule summary of linear algebra would have to describe the subject as the interplay of linear transformations and vector spaces. Here we go.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we present a formal definition of a vector space, which will lead to an extra increment of abstraction. Once defined, we study its most basic properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A basis of a vector space is one of the most useful concepts in linear algebra. It often provides a concise, finite description of an infinite vector space.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will conclude our introduction to linear transformations by bringing together the twin properties of injectivity and surjectivity and consider linear transformations with both of these properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 4
- Type
- Textbook
- Language
- English
- Content Type
- text/html
This section's topic will perhaps seem out of place at first, but we will make the connection soon with eigenvalues and eigenvectors. This is also our first look at one of the central ideas of Chapter R.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
This section's topic will perhaps seem out of place at first, but we will make the connection soon with eigenvalues and eigenvectors. This is also our first look at one of the central ideas of Chapter R.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will conclude our introduction to linear transformations by bringing together the twin properties of injectivity and surjectivity and consider linear transformations with both of these properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Some linear transformations possess one, or both, of two key properties, which go by the names injective and surjective. We will see that they are closely related to ideas like linear independence and spanning, and subspaces like the null space and the column space. In this section we will define an injective linear transformation and analyze the resulting consequences. The next section will do the same for the surjective property. In the final section of this chapter we will see what happens when we have the two properties simultaneously.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Some linear transformations possess one, or both, of two key properties, which go by the names injective and surjective. We will see that they are closely related to ideas like linear independence and spanning, and subspaces like the null space and the column space. In this section we will define an injective linear transformation and analyze the resulting consequences. The next section will do the same for the surjective property. In the final section of this chapter we will see what happens when we have the two properties simultaneously.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We know how to add vectors and how to multiply them by scalars. Together, these operations give us the possibility of making linear combinations. Similarly, we know how to add matrices and how to multiply matrices by scalars. In this section we mix all these ideas together and produce an operation known as matrix multiplication. This will lead to some results that are both surprising and central. We begin with a definition of how to multiply a vector by a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A basis of a vector space is one of the most useful concepts in linear algebra. It often provides a concise, finite description of an infinite vector space.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Almost every vector space we have encountered has been infinite in size (an exception is Example VSS). But some are bigger and richer than others. Dimension, once suitably defined, will be a measure of the size of a vector space, and a useful tool for studying its properties. You probably already have a rough notion of what a mathematical definition of dimension might be — try to forget these imprecise ideas and go with the new ones given here.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
You may have noticed that many questions about elements of abstract vector spaces eventually become questions about column vectors or systems of equations. Example SM32 would be an example of this. We will make this vague idea more precise in this section.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will conclude our introduction to linear transformations by bringing together the twin properties of injectivity and surjectivity and consider linear transformations with both of these properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen that linear transformations whose domain and codomain are vector spaces of columns vectors have a close relationship with matrices (Theorem MBLT, Theorem MLTCV). In this section, we will extend the relationship between matrices and linear transformations to the setting of linear transformations between abstract vector spaces.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen in Section MR that a linear transformation can be represented by a matrix, once we pick bases for the domain and codomain. How does the matrix representation change if we choose different bases? Which bases lead to especially nice representations? From the infinite possibilities, what is the best possible representation? This section will begin to answer these questions. But first we need to define eigenvalues for linear transformations and the change-of-basis matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
This section's topic will perhaps seem out of place at first, but we will make the connection soon with eigenvalues and eigenvectors. This is also our first look at one of the central ideas of Chapter R.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen in Section MR that a linear transformation can be represented by a matrix, once we pick bases for the domain and codomain. How does the matrix representation change if we choose different bases? Which bases lead to especially nice representations? From the infinite possibilities, what is the best possible representation? This section will begin to answer these questions. But first we need to define eigenvalues for linear transformations and the change-of-basis matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen that linear transformations whose domain and codomain are vector spaces of columns vectors have a close relationship with matrices (Theorem MBLT, Theorem MLTCV). In this section, we will extend the relationship between matrices and linear transformations to the setting of linear transformations between abstract vector spaces.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
You may have noticed that many questions about elements of abstract vector spaces eventually become questions about column vectors or systems of equations. Example SM32 would be an example of this. We will make this vague idea more precise in this section.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We know how to add vectors and how to multiply them by scalars. Together, these operations give us the possibility of making linear combinations. Similarly, we know how to add matrices and how to multiply matrices by scalars. In this section we mix all these ideas together and produce an operation known as matrix multiplication. This will lead to some results that are both surprising and central. We begin with a definition of how to multiply a vector by a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen in Section SD that under the right conditions a square matrix is similar to a diagonal matrix. We recognize now, via Theorem SCB, that a similarity transformation is a change of basis on a matrix representation. So we can now discuss the choice of a basis used to build a matrix representation, and decide if some bases are better than others for this purpose. This will be the tone of this section. We will also see that every matrix has a reasonably useful matrix representation, and we will discover a new class of diagonalizable linear transformations. First we need some basic facts about triangular matrices.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We know how to add vectors and how to multiply them by scalars. Together, these operations give us the possibility of making linear combinations. Similarly, we know how to add matrices and how to multiply matrices by scalars. In this section we mix all these ideas together and produce an operation known as matrix multiplication. This will lead to some results that are both surprising and central. We begin with a definition of how to multiply a vector by a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We saw in Theorem CINM that if a square matrix \(A\) is nonsingular, then there is a matrix \(B\) so that \(AB=I_n\text{.}\) In other words, \(B\) is halfway to being an inverse of \(A\text{.}\) We will see in this section that \(B\) automatically fulfills the second condition (\(BA=I_n\)). Example MWIAA showed us that the coefficient matrix from Archetype A had no inverse. Not coincidentally, this coefficient matrix is singular. We will make all these connections precise now. Not many examples or definitions in this section, just theorems.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen in Section MR that a linear transformation can be represented by a matrix, once we pick bases for the domain and codomain. How does the matrix representation change if we choose different bases? Which bases lead to especially nice representations? From the infinite possibilities, what is the best possible representation? This section will begin to answer these questions. But first we need to define eigenvalues for linear transformations and the change-of-basis matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The previous section introduced eigenvalues and eigenvectors, and concentrated on their existence and determination. This section will be more about theorems, and the various properties eigenvalues and eigenvectors enjoy. Like a good 4×100 meter relay, we will lead-off with one of our better theorems and save the very best for the anchor leg.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen that linear transformations whose domain and codomain are vector spaces of columns vectors have a close relationship with matrices (Theorem MBLT, Theorem MLTCV). In this section, we will extend the relationship between matrices and linear transformations to the setting of linear transformations between abstract vector spaces.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will conclude our introduction to linear transformations by bringing together the twin properties of injectivity and surjectivity and consider linear transformations with both of these properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section, we will define the eigenvalues and eigenvectors of a matrix, and see how to compute them. More theoretical properties will be taken up in the next section.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
You may have noticed that many questions about elements of abstract vector spaces eventually become questions about column vectors or systems of equations. Example SM32 would be an example of this. We will make this vague idea more precise in this section.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We saw in Theorem CINM that if a square matrix \(A\) is nonsingular, then there is a matrix \(B\) so that \(AB=I_n\text{.}\) In other words, \(B\) is halfway to being an inverse of \(A\text{.}\) We will see in this section that \(B\) automatically fulfills the second condition (\(BA=I_n\)). Example MWIAA showed us that the coefficient matrix from Archetype A had no inverse. Not coincidentally, this coefficient matrix is singular. We will make all these connections precise now. Not many examples or definitions in this section, just theorems.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We know how to add vectors and how to multiply them by scalars. Together, these operations give us the possibility of making linear combinations. Similarly, we know how to add matrices and how to multiply matrices by scalars. In this section we mix all these ideas together and produce an operation known as matrix multiplication. This will lead to some results that are both surprising and central. We begin with a definition of how to multiply a vector by a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The previous section introduced eigenvalues and eigenvectors, and concentrated on their existence and determination. This section will be more about theorems, and the various properties eigenvalues and eigenvectors enjoy. Like a good 4×100 meter relay, we will lead-off with one of our better theorems and save the very best for the anchor leg.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Some linear transformations possess one, or both, of two key properties, which go by the names injective and surjective. We will see that they are closely related to ideas like linear independence and spanning, and subspaces like the null space and the column space. In this section we will define an injective linear transformation and analyze the resulting consequences. The next section will do the same for the surjective property. In the final section of this chapter we will see what happens when we have the two properties simultaneously.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
This section's topic will perhaps seem out of place at first, but we will make the connection soon with eigenvalues and eigenvectors. This is also our first look at one of the central ideas of Chapter R.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A basis of a vector space is one of the most useful concepts in linear algebra. It often provides a concise, finite description of an infinite vector space.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
There are four natural subsets associated with a matrix. We have met three already: the null space, the column space and the row space. In this section we will introduce a fourth, the left null space. The objective of this section is to describe one procedure that will allow us to find linearly independent sets that span each of these four sets of column vectors. Along the way, we will make a connection with the inverse of a matrix, so Theorem FS will tie together most all of this chapter (and the entire course so far).
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A matrix-vector product (Definition MVP) is a linear combination of the columns of the matrix and this allows us to connect matrix multiplication with systems of equations via Theorem SLSLC. Row operations are linear combinations of the rows of a matrix, and of course, reduced row-echelon form (Definition RREF) is also intimately related to solving systems of equations. In this section we will formalize these ideas with two key definitions of sets of vectors derived from a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Before we define the determinant of a matrix, we take a slight detour to introduce elementary matrices. These will bring us back to the beginning of the course and our old friend, row operations.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
There are four natural subsets associated with a matrix. We have met three already: the null space, the column space and the row space. In this section we will introduce a fourth, the left null space. The objective of this section is to describe one procedure that will allow us to find linearly independent sets that span each of these four sets of column vectors. Along the way, we will make a connection with the inverse of a matrix, so Theorem FS will tie together most all of this chapter (and the entire course so far).
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen that linear transformations whose domain and codomain are vector spaces of columns vectors have a close relationship with matrices (Theorem MBLT, Theorem MLTCV). In this section, we will extend the relationship between matrices and linear transformations to the setting of linear transformations between abstract vector spaces.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Some linear transformations possess one, or both, of two key properties, which go by the names injective and surjective. We will see that they are closely related to ideas like linear independence and spanning, and subspaces like the null space and the column space. In this section we will define an injective linear transformation and analyze the resulting consequences. The next section will do the same for the surjective property. In the final section of this chapter we will see what happens when we have the two properties simultaneously.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen in Section SD that under the right conditions a square matrix is similar to a diagonal matrix. We recognize now, via Theorem SCB, that a similarity transformation is a change of basis on a matrix representation. So we can now discuss the choice of a basis used to build a matrix representation, and decide if some bases are better than others for this purpose. This will be the tone of this section. We will also see that every matrix has a reasonably useful matrix representation, and we will discover a new class of diagonalizable linear transformations. First we need some basic facts about triangular matrices.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The companion to an injection is a surjection. Surjective linear transformations are closely related to spanning sets and ranges. So as you read this section reflect back on Section ILT and note the parallels and the contrasts. In the next section, Section IVLT, we will combine the two properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Some linear transformations possess one, or both, of two key properties, which go by the names injective and surjective. We will see that they are closely related to ideas like linear independence and spanning, and subspaces like the null space and the column space. In this section we will define an injective linear transformation and analyze the resulting consequences. The next section will do the same for the surjective property. In the final section of this chapter we will see what happens when we have the two properties simultaneously.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will conclude our introduction to linear transformations by bringing together the twin properties of injectivity and surjectivity and consider linear transformations with both of these properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Early in Chapter VS we prefaced the definition of a vector space with the comment that it was “one of the two most important definitions in the entire course.” Here comes the other. Any capsule summary of linear algebra would have to describe the subject as the interplay of linear transformations and vector spaces. Here we go.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen how to compute the determinant of a matrix, and the incredible fact that we can perform expansion about any row or column to make this computation. In this largely theoretical section, we will state and prove several more intriguing properties about determinants. Our main goal will be the two results in Theorem SMZD and Theorem DRMM, but more specifically, we will see how the value of a determinant will allow us to gain insight into the various properties of a square matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will conclude our introduction to linear transformations by bringing together the twin properties of injectivity and surjectivity and consider linear transformations with both of these properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A vector space is defined as a set with two operations, meeting ten properties (Definition VS). Just as the definition of span of a set of vectors only required knowing how to add vectors and how to multiply vectors by scalars, so it is with linear independence. A definition of a linearly independent set of vectors in an arbitrary vector space only requires knowing how to form linear combinations and equating these with the zero vector. Since every vector space must have a zero vector (Property Z), we always have a zero vector at our disposal.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we present a formal definition of a vector space, which will lead to an extra increment of abstraction. Once defined, we study its most basic properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Almost every vector space we have encountered has been infinite in size (an exception is Example VSS). But some are bigger and richer than others. Dimension, once suitably defined, will be a measure of the size of a vector space, and a useful tool for studying its properties. You probably already have a rough notion of what a mathematical definition of dimension might be — try to forget these imprecise ideas and go with the new ones given here.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen how to compute the determinant of a matrix, and the incredible fact that we can perform expansion about any row or column to make this computation. In this largely theoretical section, we will state and prove several more intriguing properties about determinants. Our main goal will be the two results in Theorem SMZD and Theorem DRMM, but more specifically, we will see how the value of a determinant will allow us to gain insight into the various properties of a square matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Almost every vector space we have encountered has been infinite in size (an exception is Example VSS). But some are bigger and richer than others. Dimension, once suitably defined, will be a measure of the size of a vector space, and a useful tool for studying its properties. You probably already have a rough notion of what a mathematical definition of dimension might be — try to forget these imprecise ideas and go with the new ones given here.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The previous section introduced eigenvalues and eigenvectors, and concentrated on their existence and determination. This section will be more about theorems, and the various properties eigenvalues and eigenvectors enjoy. Like a good 4×100 meter relay, we will lead-off with one of our better theorems and save the very best for the anchor leg.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Once the dimension of a vector space is known, then the determination of whether or not a set of vectors is linearly independent, or if it spans the vector space, can often be much easier. In this section we will state a workhorse theorem and then apply it to the column space and row space of a matrix. It will also help us describe a super-basis for \(\complex{m}\text{.}\)
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The previous section introduced eigenvalues and eigenvectors, and concentrated on their existence and determination. This section will be more about theorems, and the various properties eigenvalues and eigenvectors enjoy. Like a good 4×100 meter relay, we will lead-off with one of our better theorems and save the very best for the anchor leg.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A subspace is a vector space that is contained within another vector space. So every subspace is a vector space in its own right, but it is also defined relative to some other (larger) vector space. We will discover shortly that we are already familiar with a wide variety of subspaces from previous sections.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A subspace is a vector space that is contained within another vector space. So every subspace is a vector space in its own right, but it is also defined relative to some other (larger) vector space. We will discover shortly that we are already familiar with a wide variety of subspaces from previous sections.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we present a formal definition of a vector space, which will lead to an extra increment of abstraction. Once defined, we study its most basic properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Before we define the determinant of a matrix, we take a slight detour to introduce elementary matrices. These will bring us back to the beginning of the course and our old friend, row operations.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Almost every vector space we have encountered has been infinite in size (an exception is Example VSS). But some are bigger and richer than others. Dimension, once suitably defined, will be a measure of the size of a vector space, and a useful tool for studying its properties. You probably already have a rough notion of what a mathematical definition of dimension might be — try to forget these imprecise ideas and go with the new ones given here.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Before we define the determinant of a matrix, we take a slight detour to introduce elementary matrices. These will bring us back to the beginning of the course and our old friend, row operations.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The companion to an injection is a surjection. Surjective linear transformations are closely related to spanning sets and ranges. So as you read this section reflect back on Section ILT and note the parallels and the contrasts. In the next section, Section IVLT, we will combine the two properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen in Section SD that under the right conditions a square matrix is similar to a diagonal matrix. We recognize now, via Theorem SCB, that a similarity transformation is a change of basis on a matrix representation. So we can now discuss the choice of a basis used to build a matrix representation, and decide if some bases are better than others for this purpose. This will be the tone of this section. We will also see that every matrix has a reasonably useful matrix representation, and we will discover a new class of diagonalizable linear transformations. First we need some basic facts about triangular matrices.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen in Section SD that under the right conditions a square matrix is similar to a diagonal matrix. We recognize now, via Theorem SCB, that a similarity transformation is a change of basis on a matrix representation. So we can now discuss the choice of a basis used to build a matrix representation, and decide if some bases are better than others for this purpose. This will be the tone of this section. We will also see that every matrix has a reasonably useful matrix representation, and we will discover a new class of diagonalizable linear transformations. First we need some basic facts about triangular matrices.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Some linear transformations possess one, or both, of two key properties, which go by the names injective and surjective. We will see that they are closely related to ideas like linear independence and spanning, and subspaces like the null space and the column space. In this section we will define an injective linear transformation and analyze the resulting consequences. The next section will do the same for the surjective property. In the final section of this chapter we will see what happens when we have the two properties simultaneously.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen in Section SD that under the right conditions a square matrix is similar to a diagonal matrix. We recognize now, via Theorem SCB, that a similarity transformation is a change of basis on a matrix representation. So we can now discuss the choice of a basis used to build a matrix representation, and decide if some bases are better than others for this purpose. This will be the tone of this section. We will also see that every matrix has a reasonably useful matrix representation, and we will discover a new class of diagonalizable linear transformations. First we need some basic facts about triangular matrices.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
The companion to an injection is a surjection. Surjective linear transformations are closely related to spanning sets and ranges. So as you read this section reflect back on Section ILT and note the parallels and the contrasts. In the next section, Section IVLT, we will combine the two properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 2
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Early in Chapter VS we prefaced the definition of a vector space with the comment that it was “one of the two most important definitions in the entire course.” Here comes the other. Any capsule summary of linear algebra would have to describe the subject as the interplay of linear transformations and vector spaces. Here we go.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
You may have noticed that many questions about elements of abstract vector spaces eventually become questions about column vectors or systems of equations. Example SM32 would be an example of this. We will make this vague idea more precise in this section.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A subspace is a vector space that is contained within another vector space. So every subspace is a vector space in its own right, but it is also defined relative to some other (larger) vector space. We will discover shortly that we are already familiar with a wide variety of subspaces from previous sections.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we present a formal definition of a vector space, which will lead to an extra increment of abstraction. Once defined, we study its most basic properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A matrix-vector product (Definition MVP) is a linear combination of the columns of the matrix and this allows us to connect matrix multiplication with systems of equations via Theorem SLSLC. Row operations are linear combinations of the rows of a matrix, and of course, reduced row-echelon form (Definition RREF) is also intimately related to solving systems of equations. In this section we will formalize these ideas with two key definitions of sets of vectors derived from a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we present a formal definition of a vector space, which will lead to an extra increment of abstraction. Once defined, we study its most basic properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A subspace is a vector space that is contained within another vector space. So every subspace is a vector space in its own right, but it is also defined relative to some other (larger) vector space. We will discover shortly that we are already familiar with a wide variety of subspaces from previous sections.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A matrix-vector product (Definition MVP) is a linear combination of the columns of the matrix and this allows us to connect matrix multiplication with systems of equations via Theorem SLSLC. Row operations are linear combinations of the rows of a matrix, and of course, reduced row-echelon form (Definition RREF) is also intimately related to solving systems of equations. In this section we will formalize these ideas with two key definitions of sets of vectors derived from a matrix.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
In this section we will conclude our introduction to linear transformations by bringing together the twin properties of injectivity and surjectivity and consider linear transformations with both of these properties.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Early in Chapter VS we prefaced the definition of a vector space with the comment that it was “one of the two most important definitions in the entire course.” Here comes the other. Any capsule summary of linear algebra would have to describe the subject as the interplay of linear transformations and vector spaces. Here we go.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
Early in Chapter VS we prefaced the definition of a vector space with the comment that it was “one of the two most important definitions in the entire course.” Here comes the other. Any capsule summary of linear algebra would have to describe the subject as the interplay of linear transformations and vector spaces. Here we go.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
We have seen that linear transformations whose domain and codomain are vector spaces of columns vectors have a close relationship with matrices (Theorem MBLT, Theorem MLTCV). In this section, we will extend the relationship between matrices and linear transformations to the setting of linear transformations between abstract vector spaces.
- License
- GFDL-1.2
- Submitted At
- September 11th, 2017
- 7 years ago
- Views
- 3
- Type
- Textbook
- Language
- English
- Content Type
- text/html
A rotatable model of the cross product of two vectors.
- License
- CC-BY-SA-4.0
- Created On
- August 7th, 2018
- 6 years ago
- Views
- 2
- Type
- Applet
- Language
- English
- Content Type
- text/html; charset=utf-8